
Ansys AVx仿真方案助力ENCAP 2026

2025年7月22日,在第八届智能辅助驾驶大会上,Ansys辅助驾驶仿真方案主管许富强对ENCAP 2026标准进行了分析。他指出,评价体系从以被动安全及车辆碰撞性能为核心,转变为构建全新评价框架,大幅提升ADAS在评价体系中的权重,测试场景数量和覆盖点呈指数级增长,还正式认可虚拟仿真技术为工程方法,引入鲁棒层作为加分项,对仿真置信度提出新要求,同时新标准在人机交互方面也对驾驶员相关交互有了诸多新要求。
许富强表示,Ansys针对智能辅助驾驶仿真推出AVxcelerate产品体系,包含Autonomy、Medini和AVX Sensor三款子产品。Autonomy能结合法规开展全面场景仿真,实现场景泛化与关键场景筛选;Medini专注功能安全与预期功能安全仿真分析,可与Autonomy形成闭环;AVX Sensor提供多种传感器物理级仿真。该产品体系可助力国内OEM厂商提升研发效率,满足法规要求。

许富强 | Ansys辅助驾驶仿真方案主管
以下为演讲内容整理:
ENCAP 2026解读
今年,新的ENCAP标准发布,相较于以往版本,此次更新幅度较大。尽管ENCAP并非强制性法规,但其在行业内具有广泛影响力。自ENCAP 2026版本起,其整体评价体系发生了显著变革。
此前,ENCAP评价体系主要以被动安全及车辆碰撞性能为核心,而2026版本则构建了全新的评价框架。同时,计分原则也进行了多项调整。此外,ADAS在评价体系中的权重显著提升。所有与ADAS相关的测试场景数量均有所增加,且测试覆盖点呈指数级增长。
值得注意的是,新版本正式认可虚拟仿真技术作为一种工程方法。同时,引入鲁棒层作为加分项,这一举措对ADAS仿真的置信度提出了新要求,旨在尽可能多地泛化场景,以更贴近真实用户使用ADAS的场景,此为引入鲁棒层的主要目标。
在人机交互方面,新标准对驾驶员相关交互提出了诸多新要求,特别是针对触摸屏等设计元素,将对国内智能辅助驾驶的设计产生重要影响。尤为关键的是,所有ADAS功能均与驾驶员状态相关联。若驾驶员处于非专注状态,则所有ADAS功能及报警决策需提前触发;反之,若驾驶员保持专注,则ADAS功能、警告及决策可适当延迟。此设计旨在使系统更好地适应驾驶员状态,此为新标准的一大重要变革。
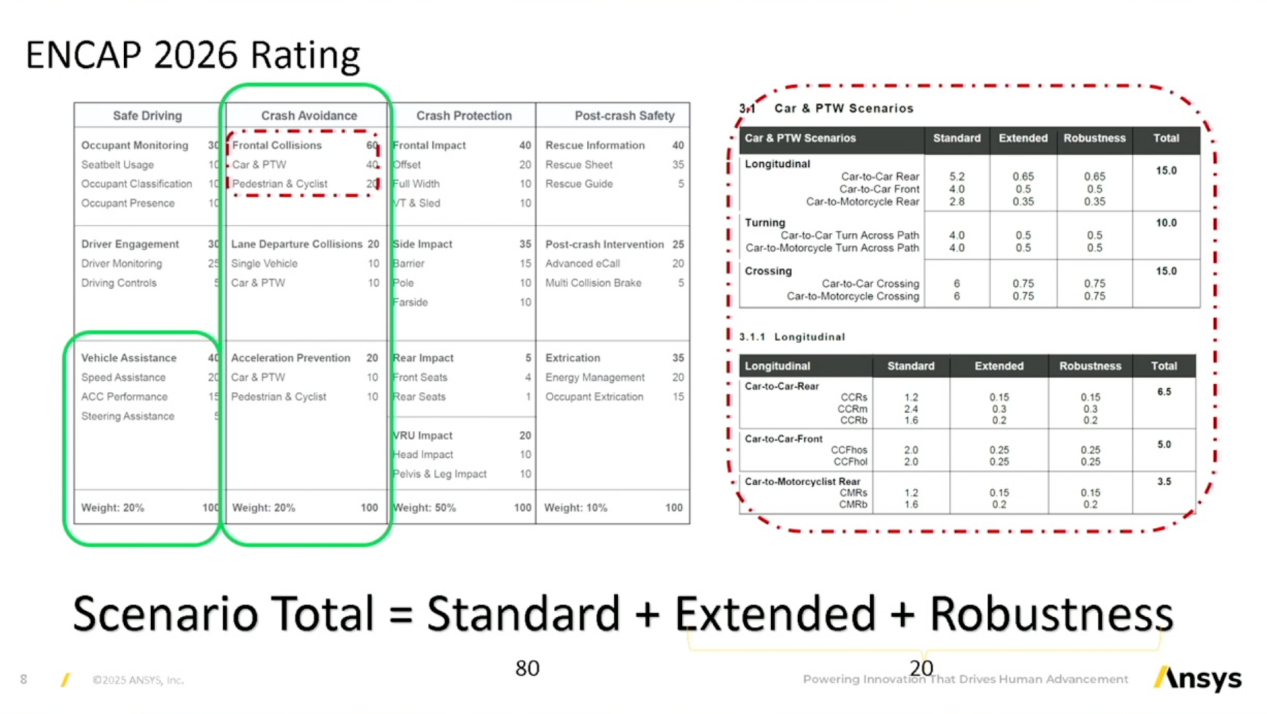
此次ENCAP更新中,ADAS相关功能的权重因子显著提升。针对所规定的各类场景,包括后续具体细化的场景,每个场景的得分均由三部分构成,标准层得分、扩展层得分以及鲁棒层得分,最终将所有场景得分累加,即为整体评测得分。
图源:演讲嘉宾素材
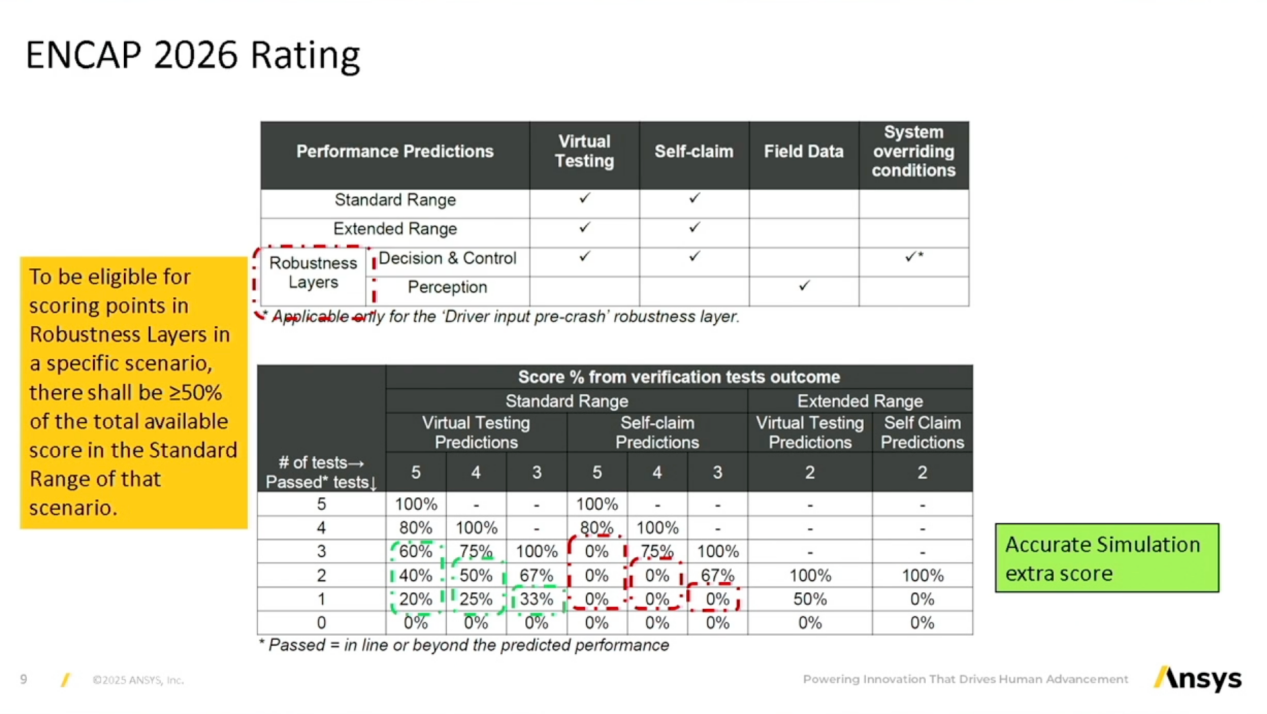
整个评测体系提出了多项要求,涵盖标准层、扩展层及鲁棒层。其中,鲁棒层又细分为与路径规划相关的部分和与感知相关的部分。目前,所有感知测试均在场地测试中完成,而此次更新正式引入了虚拟仿真技术作为分析方法。
积分体系较为复杂,积分原则亦如此,但其整体体现了一个核心原则,若仿真置信度与实车测试结果相吻合,将给予加分;若仿真置信度足够高,鲁棒层得分将作为奖励分予以额外加分。
由于每个场景下可能存在的测试场景数量极为庞大,通常一个场景会选取3至5个进行测试。在这3至5个测试场景中,依据实际通过的项目数量进行得分计算。不过,标准层与扩展层的得分规则存在差异。在标准层得分体系中,若仿真结果与实车测试结果相吻合,即便未全部通过测试项目,也可获得相应中间分数;然而,若仿真置信度不足,则必须全部通过测试项目方可得分,中间分数不予计算。这是其针对仿真置信度所设定的额外加分原则。
图源:演讲嘉宾素材
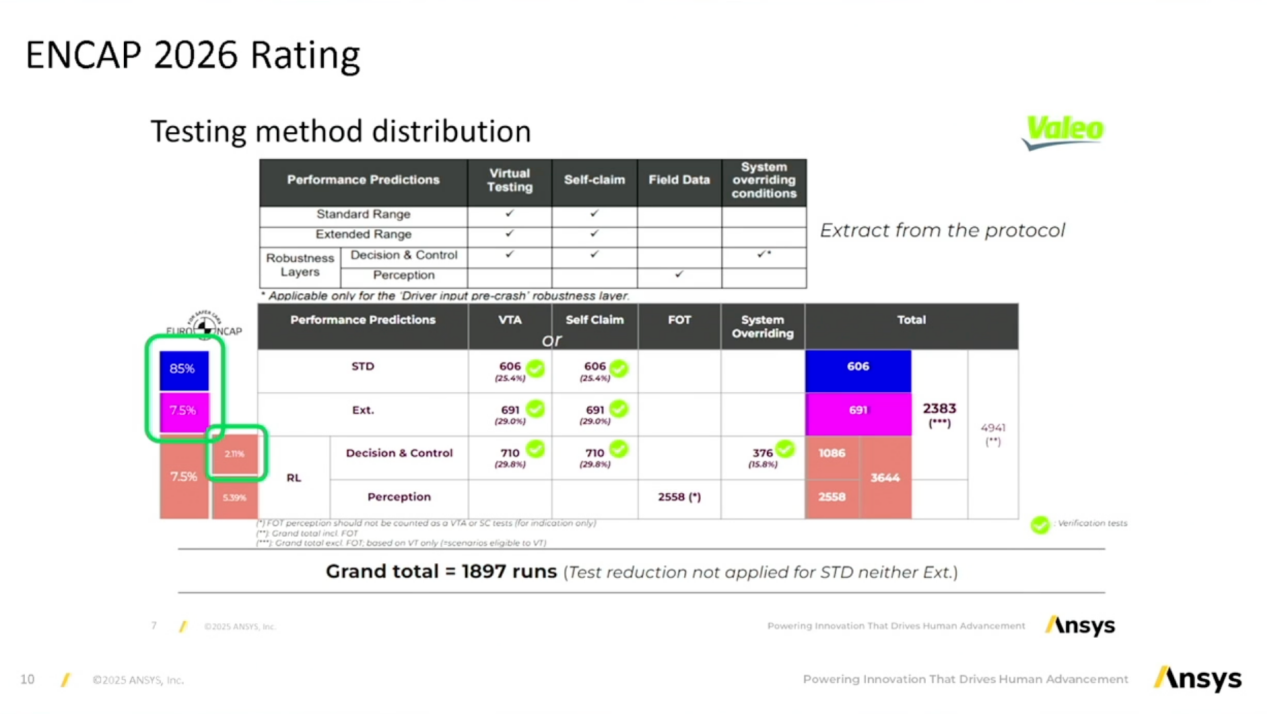
上个月,法雷奥欧洲与Ansys公司联合举办了一场关于ENCAP 2026的线上研讨会。会上,法雷奥对ENCAP涉及ADAS的标准层、扩展层及鲁棒层的所有测试点进行了总数统计。尽管每个场景实际测试的条目可能仅为3至5条,但这些条目是从一个庞大的测试池中选取的。若将所有测试点纳入统计,总数接近5000个。在此情况下,若要确保获得五星级评分,几乎不可能通过实际测试覆盖全部5000个测试点。因此,必须引入虚拟仿真方法以开展相关工作。
图源:演讲嘉宾素材
对于虚拟仿真,ENCAP 2026带来了以下变化,一是ADAS 场景下需测试的点数量呈指数级增长;二是对虚拟仿真的置信度提出了明确要求。在此之后,对于主机厂而言,如何开展仿真工作、如何选择工具链、如何验证模型以及如何进行版本和文档管理,也成为虚拟仿真要求中涉及的内容。
ENCAP主要面向终端客户层,GSR法规主要针对OEM厂家,但二者底层逻辑一致。回顾欧洲ADAS相关法律的发展历程,十几年前,ADAS相关法律仅涵盖几个场景,而其发展趋势表现为测试场景数量不断增加,车速不断提高,以此提升整体测试难度。
最近几年内,包括法规152、法规157、欧洲L2相关法规以及法规171等,其要求不仅体现在测试场景数量的增加上,更对系统能力和整体工程能力提出了要求。这其中涵盖了EDR、最小风险控制方法等方面的要求。整体而言,对于ADAS是以系统能力为标准进行考量的。
法规157虽未明确要求必须开展虚拟仿真,但要求(EM厂家提供 ADAS 功能的工作范围和能力边界,而这一要求几乎需借助ADAS仿真来完成。自法规171和152起,今年所有相关方均接受了ADAS仿真,并鼓励采用ADAS仿真进行测试。
在此过程中,存在两个较为重要的工程手段,即敏感度分析和可靠性分析。敏感度分析作为一种工程分析手段,针对某一场景中的众多因素,针对所关注的KPI开展基于实验设计的分析,以确定各因素对所关注KPI的影响程度,进而依据分析结果进行系统架构的设计与优化,拓展ADAS功能的边界。可靠性分析则结合统计学分析方法,考虑特定场景中车速分布、道路分布等概率分布情况,再结合传感器和ADAS功能架构,最终得出ADAS功能在ODD范围内的风险系数,以此实现对ADAS功能风险的控制。
ENCAP 2026 的一项重大更新在于明确提出了仿真置信度要求,其中更多涉及TTC的要求。然而,TTC 要求存在一个较为微妙的问题,ENCAP 所要求的传感器为理想传感器, TTC 要求本身几乎不构成问题,因其未涉及感知层面的问题。实际上,真正的挑战在于车辆动力学方面,例如碰撞车速以及最终刹停距离等指标。
回顾整个ADAS仿真及行业现状,目前国内在SOTIF和功能安全仿真分析方面,与ADAS功能分析和仿真处于独立状态,且与ADAS功能开发过程相分离。如何将SOTIF和功能安全与当前ADAS功能开发流程相结合,是国内OEM当前面临的问题。
当前,国内众多OEM厂商的产品在出口至欧洲时,需满足欧洲多项法规要求,如第157号法规等。如何确保产品不仅符合欧盟的产品标准,同时研发流程也契合欧盟法规要求,成为国内厂商面临的一大挑战。
其次,关于仿真置信度的要求,若能提升仿真置信度,则可在一定程度上替代场地测试和实车测试,这对OEM厂商而言具有显著优势。此外,效率问题亦不容忽视。尽管国内OEM厂商深知实车测试能够解决诸多问题,但其高昂的成本令人望而却步。随着端到端等新技术的涌现,实车测试的压力进一步加剧,因此,寻求一种快速有效的方法成为长远之计。值得一提的是,欧洲汽车行业在发展过程中,广泛应用了统计学方法,并将安全分析与 ADAS 仿真紧密结合,这部分经验对优化 ADAS 开发流程具有积极意义。
Ansys产品介绍
Ansys针对智能辅助驾驶仿真推出的AVxcelerate产品体系主要包含三款子产品,第一款为Autonomy,这是一款基于云端的场景仿真软件,其显著优势在于能够与欧洲第157号法规所规定的ODD要求,或SOTIF真要求相结合,从而开展全面的场景仿真工作,同时支持传感器及前照灯的仿真模拟。
我们的平台并非全领域仿真平台,而是更专注于感知层仿真。AVxcelerate的核心目标在于实现SIL的功能。其中,Autonomy产品侧重于实现场景的泛化处理与关键场景的筛选,从而引导研发资源聚焦于关键场景的分析与优化工作。

图源:演讲嘉宾素材
Medini是 Ansys 的另一款软件,专注于功能安全与预期功能安全的仿真分析。目前,我们已能够在Autonomy软件中开展SOTIF相关仿真工作。当前,我们正与国内客户合作推进一项工具链打通项目,在Medini中完成SOTIF仿真后,可直接将仿真数据导入Autonomy进行场景仿真,再通过分析将仿真结果回传至Medini形成闭环。
此外,关于AVX Sensor,这是Ansys通过收购专业从事光学仿真与电学仿真的软件公司后,基于其技术开发的传感器仿真解决方案。
我们期望能够助力国内OEM厂商,借助Autonomy软件开展大规模的场景泛化工作,从中筛选出约1000个关键场景。针对这些关键场景进行感知在环仿真,可显著减轻后续场地测试与实车测试的负担,进而提升整体研发效率。
目前,AVX Sensor主要提供相机、毫米波雷达、激光雷达和红外传感器这四种传感器的物理级仿真,下图能较好地说明相关情况。
图源:演讲嘉宾素材
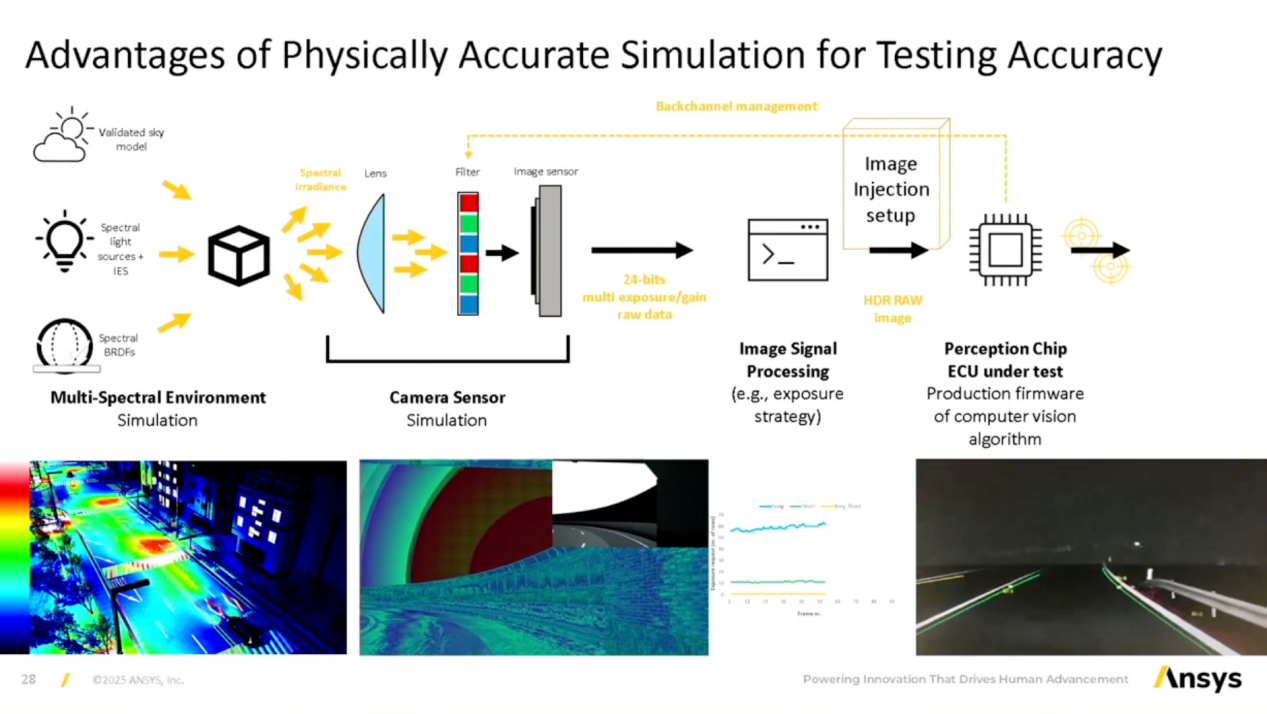
针对相机传感器,我们会进行1:1建模,涵盖从镜头到图像传感器,再到图像信号处理器的完整结构。此外,我们会充分考虑周边环境因素,包括光照条件以及环境对光线的反射情况。由于周边环境材料对成像效果影响显著,因此在建模过程中需纳入环境材料的影响因素。成像过程采用光线追踪的逆向推导方法,以实现较高的成像真实度。该方法的优势在于成像效果逼真,但缺点是对计算资源要求较高。得益于GPU技术的持续发展,目前我们已实现对800万像素IQ6相机的实时仿真。
我们能够较为真实地仿真各类极端天气状况,以及与光照相关的多种工况。在中国最新的L2级自动驾驶法规中,存在一些与SOTIF相关的要求,我们的仿真技术可针对这些要求开展相关仿真工作。
毫米波雷达的仿真亦是如此,我们能够较好地重现极端场景。例如在隧道场景中,由于隧道内存在大量电磁波反射,易导致误报现象,针对此类情况,我们可进行高质量的仿真。
在我们的Autonomy产品中,对于客户而言操作简便,作为一款云端产品,用户只需导入Opendrive格式和Openscenario格式的文件,设定好参数、泛化条件及概率,即可开展场景泛化工作。其后台集成了Ansys的另一款优化软件Optislang,该软件会在参数范围内进行优化,依据用户定义的KPI进行迭代优化,最终快速实现关键区域的持续细化,从而获取真正关键的仿真结果。在此过程中,会纳入参数分布概率等要素,以定义完整的KPI和参数范围。
在此阶段,用户可初步定义仿真数量要求。该仿真为后台运行模式,不提供图形化界面,但后台会自动完成场景泛化与优化功能,将场景泛化后的仿真工作等效转化为在不同参数域内的优化任务。仿真完成后,可借助配套工具开展敏感度分析与可靠性分析。
(以上内容来自Ansys辅助驾驶仿真方案主管许富强于2025年7月22日在第八届智能辅助驾驶大会发表的《Ansys AVx仿真方案助力ENCAP 2026》主题演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





