GeoMate和dSPACE合作开发自主技术 以加速ADAS和AD技术的开发

10月30日,尖端地图解决方案供应商GeoMate宣布与仿真和验证解决方案供应商dSPACE建立合作关系,以在不断扩展的运行设计域(ODD)中加速开发高级驾驶辅助系统(ADAS)和自动驾驶技术(AD)。
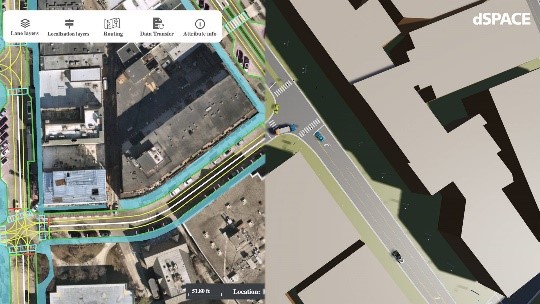
图片来源:dSPACE
GeoMate是一家专门从事人工智能制图的公司,正在将其OpenDRIVE道路网络定义和高度自动化、一致的现实世界环境3D模型集成到dSPACE仿真生态系统中。这些模型的集成使自动驾驶汽车开发人员能够基于高分辨率地理图像数据和深度学习技术,在各种场景下快速进行广泛的虚拟试驾。双方合作的目的是提高自动驾驶汽车仿真和验证的准确性、效率和可靠性。
GeoMate首席技术官Nastaran Saberi博士表示:“GeoMate为AD和ADAS系统创建紧凑的高清地图,并采用基于人工智能的创新方法进行仿真,从而提高了速度、性能和成本效益。我们的管道使用高分辨率地理空间数据作为更具成本效益的数据源来创建紧凑的高清地图。与激光雷达方法相比,这只需花费一小部分成本。GeoMate的紧凑型高清地图被转换为模拟现实世界环境(RealSimE),并作为基础层,使AD系统能够有效地使用我们的模拟数据并增强AD能力。”
dSPACE场景产品经理Michael Kluge解释道:“将GeoMate的详细、全面的地图无缝集成到我们的AURELION和ASM仿真解决方案中,为我们的客户增加了巨大的价值,并扩展了客户的ADAS/AD验证和传感器仿真能力。”
通过与合作伙伴的合作,dSPACE汽车仿真模型ASM和传感器仿真AURELION等认证和验证解决方案得到了必要的仿真工件的补充。为了有效验证自动驾驶和传感器的功能,需要基于现实的3D环境模型来准确表示道路的底层语义。将GeoMate的ASAM OpenDRIVE格式无缝集成到dSPACE平台的主要优势之一,就是允许用户与兼容的测试和部署软件堆栈协同工作。
通过此次合作,GeoMate和dSPACE希望在自动驾驶技术的仿真和验证领域制定新的标准,并提供可为自动驾驶汽车的高效和安全开发做出重大贡献的工具。GeoMate正在将其OpenDRIVE道路网络定义和高度自动化、一致的现实环境3D模型集成到dSPACE仿真生态系统中。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。