
蔚来智驾多位核心高管离职

亿欧汽车独家获悉,蔚来人工智能平台负责人白宇利已于国庆节前离职。
白宇利本科毕业于韩国延世大学,与蔚来自动驾驶副总裁任少卿同出于自动驾驶科技公司Momenta——任少卿曾是Momenta研发总监和联合创始人,白宇利则在Momenta担任过人工智能基础设施负责人。
从Momenta离职后,白宇利曾短暂创业,成立了一家专注于构建高性能通用人工智能基础设施解决方案的初创公司。
2020年8月,白宇利入职蔚来,担任人工智能平台负责人,职级为总监,向任少卿汇报。自2023年3月起,他还担任了蔚来云端工程部负责人,职级为资深总监。
白宇利所负责的业务,在智驾研发中相当于基础设施建设,为智驾算法的迭代提供云端算力、数据闭环等支持。
随着智驾方案从传统的规则算法切换至端到端算法,以及融合程度更高的VLM、VLA、世界模型等技术路线,数据和计算平台的能力愈发关键,而行业内的组织变动和人员调整也屡见不鲜。
据亿欧汽车了解,除了白宇利,蔚来世界模型负责人马宁宁、蔚来智驾产品负责人黄鑫已于近期离职。
蔚来对亿欧汽车回应,为了强化对通用人工智能最新技术的吸收,并能高效、高速、高质量地实现智能驾驶体验交付,蔚来近期主动调整了智能驾驶部门组织架构——
通过构建预研、量产、平台复制、车型复制的「4×100接力棒」模式,将智能驾驶组织与通用人工智能组织实现并轨,打造符合通用人工智能技术发展趋势的组织架构。
该组织架构调整,将更有利于蔚来全力冲刺世界模型2.0版本的开发与交付。
据称,蔚来将会从今年底到明年一季度,陆续在多个平台推出世界模型2.0的迭代版本。
技术迭代潮中的人事变动
智能驾驶是智能电动汽车竞争的核心要塞,尤其是对于蔚来这样的高端品牌而言。
近期在极氪50万级旗舰SUV——极氪9X的上市发布会上,极氪就分享了一组用户购车关注因素调研数据:“辅助驾驶系统”排到了第三,仅次于“安全性”和“舒适度”,高于传统重要购车因素如“三电”、“操控”甚至是“智能座舱”。
这在一定程度上可以说明,高端车型用户对于智驾的重视程度。
智能驾驶也一直是蔚来的投入重镇。早在2016年蔚来就开启了智驾方案的自研,是最早在Mobileye芯片上量产智驾方案的国产品牌,在智驾领域的团队规模和投入资源也一度领跑新势力。
不过,智驾领域的竞争烈度一直没有缓解,甚至愈演愈烈。
过去两年来,高阶智驾的技术风口已经多次转换,前一年龙头们还在规则算法上尽可能地丢掉高精地图,转眼就集体瞄向了靠数据驱动的端到端架构,而到今年,则进一步指向与大语言等其他模型合流的生成式智驾。
据亿欧智库发布的《2025中国高阶智能辅助驾驶最新技术洞察》报告,传统的模块化架构将感知、决策、规划等环节拆分、独立开发,依赖人工规则且存在大量信息损耗,而端到端架构则通过神经网络连接各模块,能实现数据驱动,提升迭代效率。
在这样的背景下,去年蔚来智驾团队进行了两次重要调整。
第一次调整是在去年6月,蔚来撤销了感知部、规划与控制部等模块化部门,新成立了大模型部、部署架构与方案部、时空信息部等,以切换至端到端方案的开发。
但端到端方案上车的进度未及预期,蔚来很快启动了第二次智驾组织架构的调整。
去年12月,部分智驾二级部门的负责人被换,蔚来智驾副总裁任少卿接替彭超,直接管理大模型部,陈昆盛则接替秦海龙,任部署架构与方案部负责人。
组织架构调整的过程中,伴随着持续的人事变动。
据公开信息不完全梳理:去年11月,蔚来原时空信息部门负责人袁弘渊离职;随后在去年底第二次调整架构后,原部署方案与架构部负责人秦海龙离职;今年4月,蔚来规划与控制领域专家樊昊阳离职……
从传统的规控算法向端到端转型,相当于用端到端的新团队去革原来智驾团队的命,组织的调整伴随着业务的重新整合与划分,智驾团队各部门负责人的调整与变动在行业中也屡见不鲜。
今年,理想汽车端到端模型开发与落地负责人夏中谱、世界模型负责人贾鹏、智驾团队量产负责人王佳佳等智驾核心高管也相继离职。
理想汽车的端到端方案从2023年11月开始立项,次年10月就向MAX版本用户全量推送了“端到端 VLM(视觉语言模型)”方案,但理想并不认为这就是终极解决方案,一系列人事变动的背后,这家智驾后进生已经重押了“VLA(视觉-语言-动作)”模型。
蔚来的端到端方案,则在传统的端到端架构上融合了空间认知和时间认知能力。今年5月底,蔚来世界模型NWM首个版本开始了全量推送。
亿欧汽车获悉,蔚来世界模型负责人马宁宁最近已离职。
值得一提的是,蔚来智驾一号位也在近期履新。
9月20日,据雷峰网报道,蔚来副总裁、自动驾驶研发首席专家任少卿已入职中国科学技术大学人工智能实验室,蔚来职位将同时兼任。
任少卿当时对媒体回应:“对蔚来公司的事情没有影响,学校是在常校长、潘校长和斌哥支持下搞一些中长期的研究。”
根据蔚来的回应,组织架构和人员的调整是为了更好地迭代世界模型2.0版本,目标是基于世界模型的时空认知能力,加入语言,构建Open-set(开放集)智能引擎实现开放交互。用户将不再局限于有限的指令集,而是能够自然表达,系统正确理解并执行。同时,新版本将会通过强化学习,进一步增强长时序的能力。
智驾研发中的基础设施
白宇利所负责的人工智能平台和云端工程部,主要为智驾研发提供云端算力、数据闭环、计算资源等基础设施支持,它是一块平台化业务,在此前的组织变动中所受的波及并不大。
其业务包含云端超算中心和车端计算平台,形成了独特的“端云结合”布局。
云端超算中心相当于辅助驾驶的“经验工厂”,主要是处理海量数据、训练和迭代复杂的智驾模型,有人打了这样的比方:超算中心专注于把车辆的驾驶经验提炼成知识,再教给所有车。
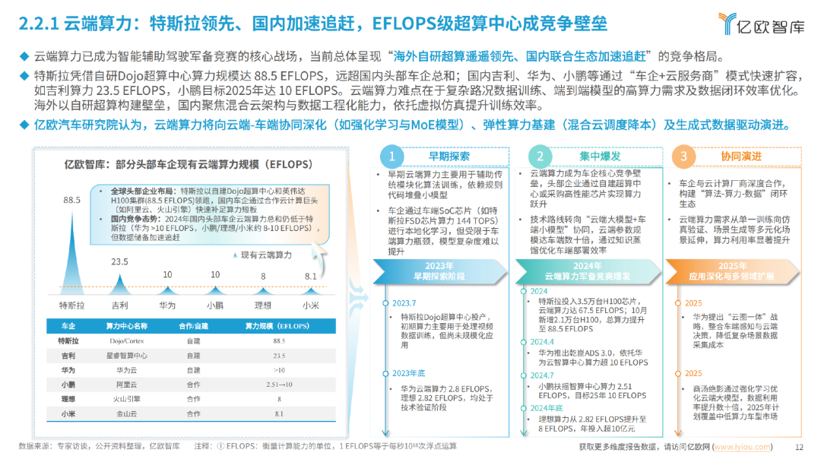
这无异于智能汽车背后的“超级大脑”,因此,云端算力已成为智能驾驶军备竞赛的核心战场。
据亿欧智库发布的《2025中国高阶智能辅助驾驶最新技术洞察》报告,在云端算力储备方面,头部公司特斯拉以自建Dojo超算中心和英伟达H100集群领跑,国内车企则通过与云计算巨头合作(如阿里云、火山引擎等)来快速补足短板。
与国内同航道的车企相比,蔚来在云端算力上的布局并不拔尖。
不过,蔚来率先采用的“端云结合”布局,则同样为其智驾方案的迭代提供了强大平台。
在去年的一次演讲中,白宇利曾公开介绍,蔚来的高性能计算平台可支撑日间峰值吞吐达到200万次的任务请求,并且同时支持1.5万个节点的并发。
除此之外,蔚来还在人工智能平台之下,研发了一套EFLOPS量级(每秒百亿亿次浮点运算)的分布式计算集群,以尽可能地提升研发效率、缩短闭环时间。
车企进行智驾模型的验证,最终避免不了的环节是把功能放在实车上跑。为了解决快速验证的瓶颈,蔚来开发了一套解决方案,叫“群体智能”——
在上一代智驾方案中,蔚来融合了4颗英伟达Orin-X芯片,其中一颗专门留给了“影子模式”,以便快速将真实的算法部署在车上,拿到测试结果。
白宇利表示,蔚来打通了边缘计算的能力,使得车云算力可以联合调度,蔚来整体端云上的算力(包括云端和车端),足足有260EOPS,相当于100个分布式的千卡训练集群。
EOPS是不同于FLOPS(每秒浮点运算次数)的一个单位,它是一个强调效率的性能指标,而FLOPS、EFLOPS主要是衡量超算中的浮点计算能力。
“这基本和特斯拉10万片H100的算力规模差不多。我们也在这里进行数据生命周期管理,并通过车端缓存和压缩技术,大幅减少车云上面流量通行。”白宇利此前介绍。
而根据可查的最新公开信息,截至去年12月,蔚来智能驾驶“端云算力”新增 15.7 EOPS,总算力达378.1 EOPS,是全国最大的“端云算力”集群。
蔚来暂未继续发布智驾报告,不过随着交付量的增加,蔚来的“端云算力”显然还在不断增加。
与此同时,蔚来也在用业内通行的方式继续加大云端算力的投入。
蔚来董事长李斌曾在今年的一次媒体沟通中表示,蔚来原来买卡比较多,后来意识到“不是卡越多模型就越好”,现在对卡的算力“管得特别紧”,也有很多卡在以租用的方式使用。
有知情人士告诉亿欧汽车,蔚来租了腾讯云、金山云小几百张卡,“只给智驾使用。”
智驾仍是历时长久、耗资巨大的持久战,在算力、数据、算法等多个维度考验着参与者们的资源储备与工程化能力。
当前,技术路线尚不明朗、终端体验也尚未拉开实质性差距,这场战事的结果还远未显现。
调整智驾部门组织架构、酝酿世界模型2.0版本的蔚来,显然将重心押注在了世界模型上。
蔚来称,继今年5月蔚来世界模型首个版本行业首发停车场自主寻路功能后,蔚来将持续释放世界模型在架构上的潜力。
在9月下旬的一次采访中,李斌表示,经过十余年的快速发展,智能电动汽车的产品形态和技术路线已开始“收敛”,但真正的“质变”尚未到来——特别是智驾。
他提出了衡量智能驾驶有效性的两个核心指标:“降低事故的比例”和“使用时长比例”,并直言,目前行业内还没有任何一家公司敢于公布城区智驾的使用时长数据,这恰恰说明,智驾的可用性和通行效率仍有巨大的提升空间。
李斌认为,智驾的下一步突破,已经不再是硬件架构的问题,而是软件和数据层面的优化。他表示,未来一两年,通过“模型的优化、算法的优化,还有数据闭环的收敛”,智驾将真正迎来质变。
而蔚来,显然也在继续储备,蓄力自己的智驾质变时刻。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





