
受章鱼触手和大象鼻启发 美国大学研发兼具柔韧性与扭矩输出的机械臂

据外媒报道,美国东北大学(Northeastern University)的研究人员研发了模仿大象鼻子的柔性机械臂,能够扭转的同时还可在其他方向保持柔韧性。该款机械臂采用了可弯曲部件,在扭转时会变硬,从而使其能够完成诸如关闭阀门以及安装灯具之类的任务。
该研究团队表示,这一发明有望成为工业环境中传统刚性机器人更安全、更灵活的替代品,降低事故发生的可能性,并提高复杂条件下的性能。东北大学机械与工业工程助理教授Jeffrey Lipton表示:“它像大象的鼻子或章鱼的触手一样灵活、可伸展且柔顺,但也能像传统工业机器人那样施加扭矩。”
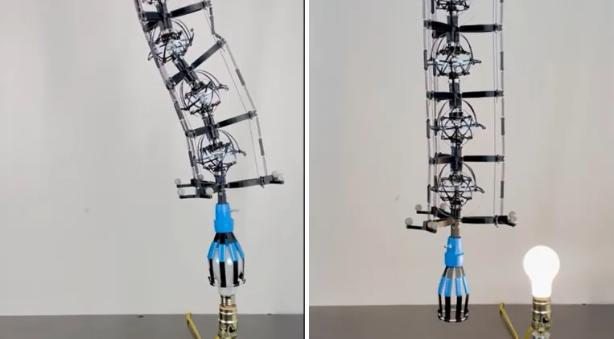
拧灯泡的机械臂(图片来源:东北大学)
灵活的扭矩解决方案
机器人主要分为两类:软体机器人与硬体机器人。硬体机器人通常被应用于工业环境中,快速执行精确的任务,不过也会存在严重的安全隐患。由于快速运动可能会造成严重伤害,因此此类设备通常被安置在防护笼中,以保护工人的安全。其优势在于能够产生扭矩,因而特别适用于需要强大旋转力的任务。
相反,软体机器人借鉴了章鱼触手和大象鼻等有机形态的设计灵感。此类机器人十分擅长移动,环境适应性强,而且能够与人类及复杂场景安全交互。与硬体机器人相比,软体机械臂在意外情况下造成的伤害更小,降低了导致严重伤害的可能性。
在涉及换灯泡等精细的任务中,两种机器人都有其优势。虽然硬体机器人能够以所需的扭矩固定住灯泡,但是其不够灵活,难以在狭窄的空间内操作。相比之下,软体机器人虽然不如硬体机器人强壮,但其能够适应环境,在处理易碎物品时避免造成损坏。
该研究团队研究了如何将这两种系统的优势进行整合,从而为多个领域带来更安全、适应性更强的机器人解决方案。
自适应机械臂
受章鱼触手和大象鼻所具的灵巧性的启发,研究人员研发了名为“扭转刚性万向节”(Torsionally Rigid Universal Couplings,TRUNCs)的机械单元。此类单元能弯曲、伸展,同时在扭转过程中会变硬,从而让其能够高效地传递力。
每个TRUNC由一个含有两个极点的球体、一条赤道以及连接两个极点的轴向链节组成。相对扭转极点可增加刚度,在保持结构灵活性的同时提供结构支撑。
研究人员打造了两种TRUNC版本,具有不同的运动能力。他们演示了TRUNC可以串联起来,形成灵活的轴,或嵌套起来以增强旋转运动。通过结合两种配置,研究人员打造了一款软体机械臂,并训练了神经网络来解读其关节运动。
此种TRUNC机械臂能够完成多项任务,如顺利关闭一个漏水的阀门、仔细将灯泡旋入插座,以及在协助操作人员的同时牢牢拧紧主板上的螺栓。此种设计演示了软体机器人如何在需要兼具扭矩和灵活性的场景中发挥作用。
该研究团队认为,基于TRUNC的机械臂能够在商业与工业环境中为传统硬体机器人提供实用且更为安全的替代方案,因为其能够在协作场景下安全高效地完成任务。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




