浙江大学开发四旋翼无人机导航系统 使无人机能够自主执行精确的飞行运动

据外媒报道,中国浙江大学一个由网络系统研究员、工程师、光学专家和机器人专家组成的(Zhejiang University)研究团队开发出一种四旋翼无人机导航系统,使其能够自主执行精确的飞行动作。研究人员在发表于期刊《Science Robotics》的论文中写道,该团队开发了一种多管齐下的系统,可使四旋翼无人机在室内外安全地自主执行复杂的特技飞行动作。
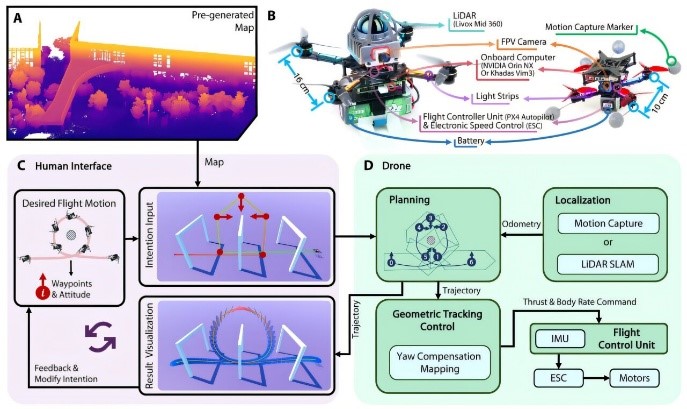
图片来源:《Science Robotics》
如果无人机能够无需人工干预自主执行任务将具有显著优势。例如,它可以在遥控飞行员视距范围之外执行飞行任务,也能大幅降低包裹配送等其他任务的成本。为此,研究人员一直致力于提升无人机的智能化水平。
就在两年前,苏黎世大学(University of Zurich)的研究团队曾开发出号称具有高度敏捷性的四旋翼无人机,能够规避障碍并执行轨迹追踪。在这项新的研究中,中国的研究团队进一步推进了这项工作,让无人机能够自主完成高难度的飞行动作,而这些动作有时是完成特定任务所必需的。
为了增强无人机自主性,研究人员开发了一套将飞行定义为一系列特技意图的系统。每个意图都可以代表姿态的变化——飞行器在3D空间中相对于地平线的位置,这些变化根据周围拓扑结构作出响应,从而实现精确复杂的飞行动作。
该系统还包含轨迹规划器,用于优化飞行路径平滑度并规避固定障碍物。同时配置了解决偏航敏感度的软件模块,以改善偏航旋转问题。实际飞行中,该系统可利用预载地图、机载飞行计算和视觉处理技术,将拓扑参数转换为空中动作,从而可以基于环境条件不断调整飞行路径。值得注意的是,该系统允许飞行器在某些时候采取不稳定姿态——这正是鸟类和蝙蝠能够实现精准飞行的关键机制。
研究团队通过仿真和实体无人机测试验证了该系统的有效性,证实其能保障无人机在室内外环境的安全飞行。测试还表明,该系统可支持无人机自主完成特技飞行,并在障碍赛道中安全导航。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。