研究人员开发具有突破性触觉灵敏度的机械手 可实现类人灵巧操作

据外媒报道,伦敦玛丽女王大学(Queen Mary University of London)的研究人员推出了一款名为F-TAC Hand的机械手,其表面70%的区域集成了高分辨率触觉传感技术,可实现与人类相似的自适应抓取能力。这项开创性研究成果发表于期刊《Nature Machine Intelligence》,标志着机器人智能及其与动态现实环境交互能力的重大突破。
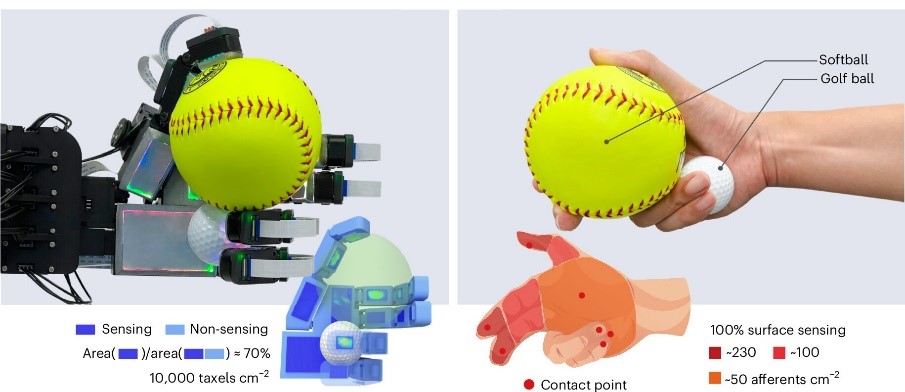
图片来源:Queen Mary University of London
尽管机器人系统在模仿人手运动学和控制算法方面已取得显著进展,但受限于触觉反馈的不足,机器人系统难以在动态环境中媲美人类的能力。F-TAC Hand的触觉传感器具有0.1毫米的超高空间分辨率,成功解决了这一根本性局限。
伦敦玛丽女王大学(Queen Mary University of London)先进机器人技术卓越中心主任Kaspar Althoefer教授评价道:“超高的空间分辨率与超大覆盖范围的结合确实前所未有。更重要的是,先进的感知算法显著改进了现有的方法,使机器人能更准确地解读与环境的交互,从而更好地理解抓取物体及其关键参数。”
F-TAC Hand的创新设计解决了机械手与高分辨率触觉传感器集成会限制手部活动范围的难题。结合能生成类人手部形状的算法,该机械手在动态现实环境中展现出强大的抓取能力。
通过600次实际场景测试验证,这种触觉具身系统在复杂操作任务中的表现显著优于无触觉反馈的对照组(p<0.0001)。这些发现为触觉具身在开发先进机器人智能中的关键作用提供了实证依据。
Althoefer教授强调了这项研究的深远意义:“这将带来更好的物体操控能力,包括手部操作,从而为制造业、人机交互和辅助技术等领域开辟更多应用场景。在开发能协助人类日常生活的机器人——包括配备机械手的人形机器人方面,蕴含着巨大潜力。”
这一进展显著缩小了人类与机器人操作能力的差距,预示着机器人能以前所未有的精细度和适应性与环境交互。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。