中国研究人员实现全手触觉机器人仿生手突破 多物体抓取成功率达100%

过去数十年间,机器人学家开发出日益先进的系统,这些系统已能模拟人类能力并有效执行各种实际任务。为了可靠地抓取、操纵和使用周围的物体,机器人需具备检测和处理触觉信息的能力,以复制人类触觉的基本过程。
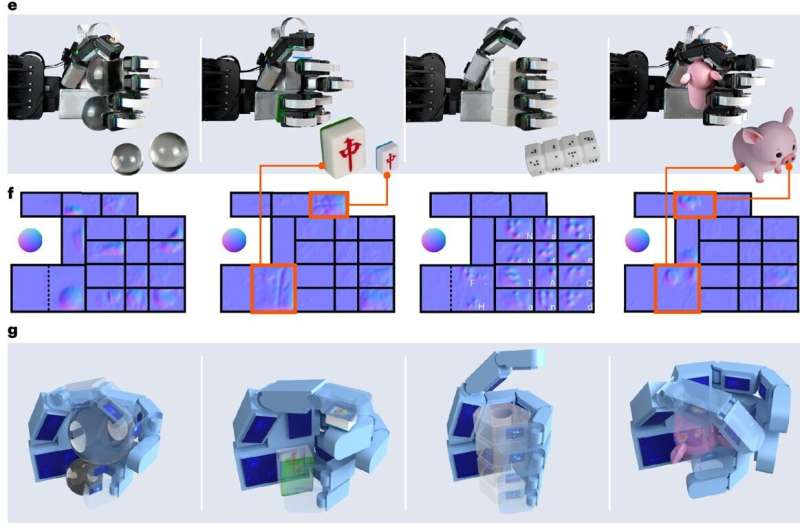
(图片来源:Nature Machine Intelligence)
据外媒报道,北京大学、北京通用人工智能研究院与伦敦玛丽女王大学(Queen Mary University of London)联合开发出F-TAC仿生机械手,旨在模仿人类的触觉感知。该仿生机械手通过收集可用于规划机械手运动和轨迹的详细触觉信息,在触觉操控任务上的表现优于现有的各种机械手。相关论文发表于期刊《Nature Machine Intelligence》。
该论文通讯作者朱毅鑫表示:“这项研究的目标是使机器能够以媲美人类的精度与适应性操控物体。解决这个问题的灵感源于人类手部复杂的触觉感知能力,以及初级躯体感觉皮层内特有的神经处理机制,该机制能够实时解析并整合海量感官输入。”
这项研究的主要目标是开发新型机械手,将从其表面收集到的触觉反馈与感觉运动机制深度整合。鉴于现有机械手多缺乏此种整合能力,该设计有望显著提升各类实际操控任务的执行效能。朱毅鑫表示:“F-TAC Hand集成17个高分辨率触觉传感器。这些传感器覆盖手掌70%的区域,可再现人手的生物结构,空间分辨率达0.1毫米,相当于每平方厘米密布1万个触觉像素。概率算法能够生成覆盖19种常见抓握类型的多样化、类人型抓握策略。这使得F-TAC Hand能够动态调整,在面对突发场景时,可在短短100毫秒内动态调整策略。”
该团队研发仿生手的最显著优势在于,它能够获取整个表面的触觉数据,并利用这些数据自主规划动作。为了评估其性能,研究人员进行了大量的实验,期间F-TAC Hand在真实场景中完成了多样化手部任务。朱毅鑫表示:“在600次真实世界实验中,相比没有触觉反馈的系统,F-TAC Hand表现出显著的优势,多物体抓取成功率从53.5%提升至100%。其潜在的实际应用包括手术辅助、高精度装配、航空航天作业,以及需要卓越操作精度的应急响应场景。”
研究人员的初期成果凸显了该仿生手的优势,其有助于提升机器人的感知与运动能力。未来,该仿生手可进一步优化,适配多平台人形机器人系统,并深入展开实验验证以评估其特定应用潜力。朱毅鑫表示:“我们将继续深化触觉传感与机器人控制的结合,探索更智能的体感互动范式,通过融合高保真物理传感与智能控制系统,推动具身智能的发展,助力实现真正意义上的通用人工智能。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。