
辅助驾驶域控核心方法论是什么|盖世大学堂辅助驾驶域控系列知识讲解

一、智能汽车时代的范式变革与技术迭代
随着系统复杂性持续提升、开发周期大幅缩短,同时质量标准丝毫不能降低,传统方法论已难以应对当前挑战。在此背景下,汽车行业的方法论正经历深刻变革,这一变革不仅体现在技术架构层面,更折射出整个行业从传统机械思维向智能体思维的根本性转变。
传统汽车行业秉持机械产品思维,将汽车视为可靠的代步工具,核心诉求聚焦于产品质量的稳定性,分布式架构便是这种思维的典型产物。彼时,汽车的功能单一且固定,研发流程围绕机械性能优化展开,整个行业处于相对稳定的“舒适期”。
然而,随着域控架构与集中式架构的兴起,汽车的定位发生了质的飞跃。辅助驾驶与智能座舱的出现,赋予了汽车全新的职能,辅助驾驶以替代司机为终极愿景,致力于实现无人驾驶;智能座舱则扮演着车内服务者的角色,为乘客提供智能化体验。这两大功能的发展,推动汽车从单纯的交通工具向智能体的“身体”演进,行业愿景已拓展至构建具备机器人逻辑的智能产品。
如今,汽车与机器人行业的融合趋势愈发明显。众多车企纷纷布局机器人领域,特斯拉等企业更是实现了汽车与机器人软件的大量复用。这种跨界融合印证了汽车向机器人演进的客观事实,也标志着行业进入了“软件定义汽车”的新阶段。在这一阶段,汽车的架构需向有机化、层次化发展,为软件迭代奠定基础;而集中式架构的普及,则进一步将行业焦点转向软件自主迭代能力的构建,力求减少人工干预,实现与用户的直接交互。
二、设计范式的三次迭代与行业发展周期
智能汽车的发展历程可围绕2015年与2025年两个关键节点,划分为三种设计范式,对应三个不同时代,行业在技术迭代中逐步明晰主路径,实现本质性变革。
2015年之前,行业处于“客体围绕主体”的范式阶段。此处的“客体”指研发的汽车产品,“主体”则是工程师。这一时期,整车研发流程(如GVDP流程)以工程师为中心,注重保障工程师的工作效率与产品质量稳定性。由于用户对汽车迭代速度需求较低,行业整体节奏较为平缓,工程师工作强度适中,产品虽迭代性有限,但能满足当时的市场需求。
2015年之后,范式转变为“主体围绕客体”。受马斯克及“软件定义汽车”理念的推动,汽车的复杂性显著提升,工程师需围绕产品迭代展开高强度工作,工作时长大幅增加。这一阶段,行业面临的核心挑战是如何应对系统复杂性的攀升,研发重心转向快速响应市场需求与技术变革。
2025年及以后,随着ChatGPT等大模型技术的发展,行业迈向“主体消失”的新阶段。大模型在研发中的应用日益广泛,工程师的角色与需求发生转变,数量需求可能减少,但对其能力要求更高。这一范式下,自动化工具与AI技术将深度融入研发流程,推动行业向高效化、智能化迈进。
从行业发展周期来看,无论是哪一范式阶段,均遵循“车厂主导—供应商主导—车厂主导”的交替模式,且迭代周期呈现“技术研发—产品落地—运营优化”的演进路径。当某一领域进入运营阶段时,往往意味着该时代即将落幕,新的技术与产品形态将应运而生。
三、汽车“身体”的架构演进:从分布式到集中化
汽车的“身体”架构经历了从分布式到层次集中化的演进过程,这一变革直接影响了软件更新能力与研发周期。
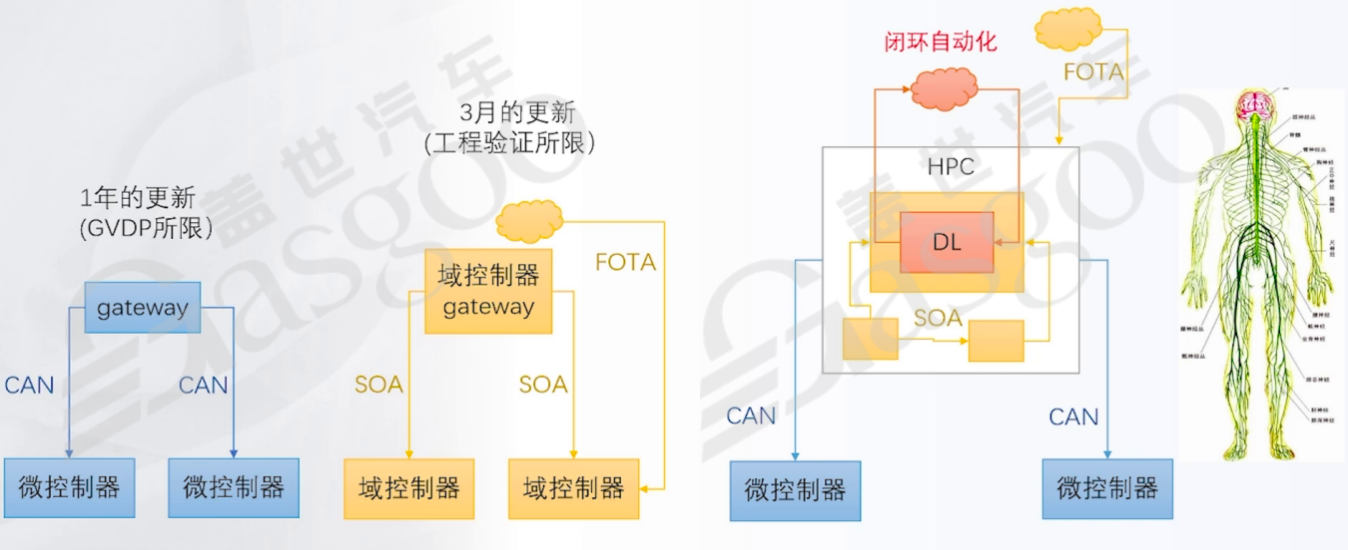
分布式架构以微控制器和网关为核心,依赖CAN总线通信,受限于GVDP流程,软件更新周期长达1年。在这种架构下,硬件与软件耦合紧密,各功能模块相对独立,迭代难度大,难以满足智能汽车对快速迭代的需求。
域控架构的出现是重要的过渡阶段,引入了域控制器和SOA(服务导向架构),支持FOTA(固件在线升级)。此时,研发周期缩短至3个月左右,其中约2个月用于迭代开发,1个月用于测试验证。尽管较分布式架构有显著提升,但仍受限于工程验证环节,且人工参与测试导致效率难以进一步突破。
集中式架构以高性能计算(HPC)为核心,融合了SOA与深度学习(DL)技术,实现了闭环自动化更新。得益于强大的算力支持,软件更新周期缩短至3-7天,且迭代主要依赖机器完成,大幅减少了人工干预。特斯拉Model 3便是采用此类架构的典型代表,其内部网络模型与SOA深度整合,支持高频次的模型训练与迭代,测试环节也通过自动化台架测试、仿真测试等手段保障质量,实现了高效的软件更新。
架构的演进不仅是硬件的升级,更是开发逻辑的革新。集中式架构下,汽车的“身体”具备了更强的软件适配性,为智能化功能的实现提供了坚实基础,也为后续的数据驱动与自主迭代铺平了道路。
四、汽车“思维”的重构:辅助驾驶与人类认知的共性
辅助驾驶系统的架构设计与人类认知过程存在诸多共性,这种共性体现在信息交互、硬件软件对应关系以及核心功能模块等方面。
从信息与能量交互来看,所有智能体包括人与辅助驾驶系统,都需要与外部环境进行信息和能量的交换,这是智能体存在与运行的基本前提。
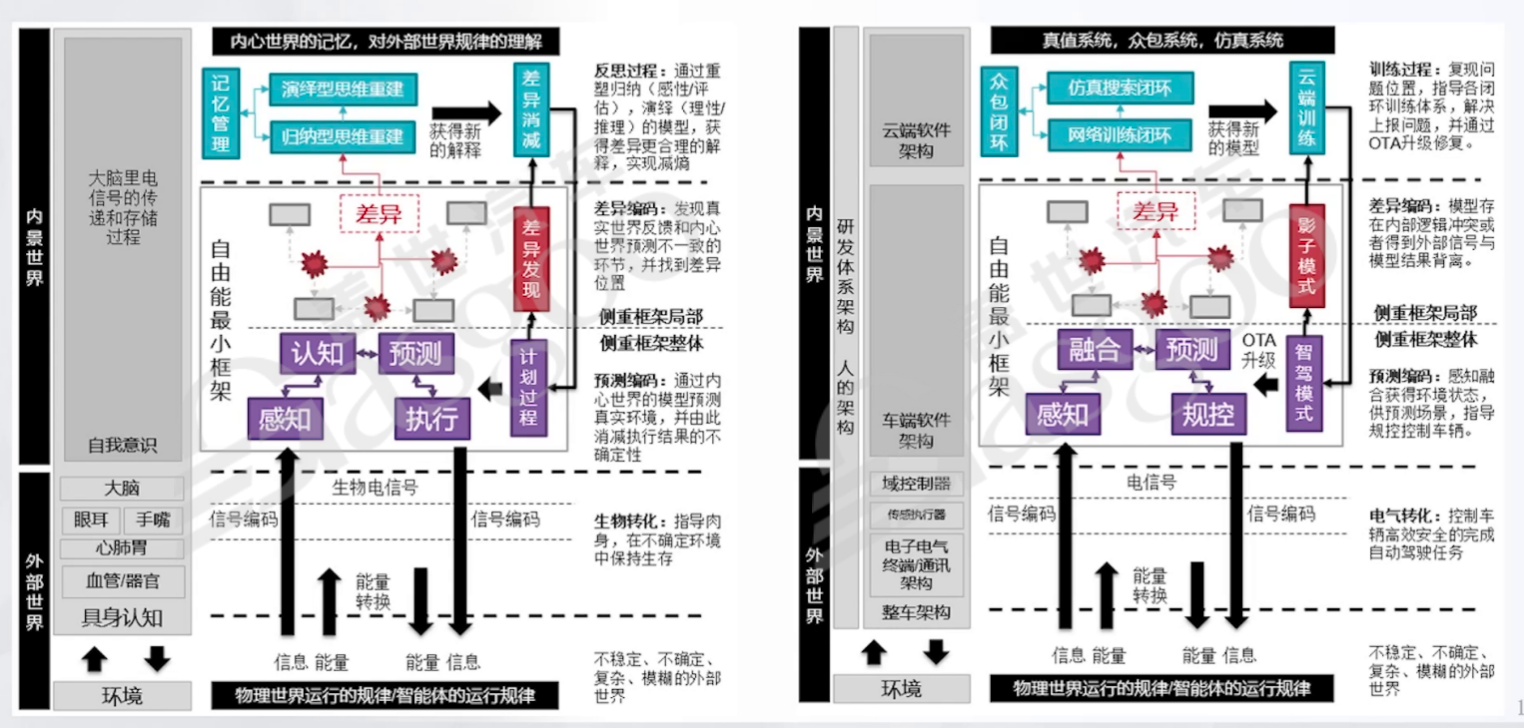
在硬件与软件对应关系上,人类的大脑、眼耳口鼻等感官器官及躯体,对应辅助驾驶中的整车架构、域控架构、电力架构等硬件部分;而人类的神经系统与大脑的认知活动,则对应辅助驾驶的车端软件与云端架构。值得注意的是,传统汽车软件仅局限于车端,而辅助驾驶时代,车云两端深度融合、不可分割,共同构成了智能系统的“思维”基础,如同人类大脑的电子流动与自我意识的表达。
辅助驾驶系统的软件架构可分为感知、认知、预测、执行四个核心模块,与人类的认知过程高度契合。感知模块如同人类的眼耳口鼻,负责获取外部环境的直接信号;认知模块对感知到的信息进行处理,形成统一的表征,类似于人类在脑内构建的世界模型;预测模块基于认知结果对未来场景进行预判,如同人类对事物发展的预期;执行模块则根据预测结果采取相应行动,实现对车辆的控制。
差异是驱动智能体成长与迭代的核心动力。在人类认知中,当预测结果与实际感知存在差异时,会触发复盘与学习过程,通过经验积累优化自身行为模式,这一过程如同辅助驾驶系统的OTA升级。辅助驾驶系统通过影子模式等手段捕捉预测与实际的差异,利用云端训练模型优化算法,并通过OTA更新至车端,提升系统性能。
这种差异驱动的迭代机制,使得辅助驾驶系统能够不断适应复杂的外部环境,正如人类在不断的经验总结中提升生存能力。同时,差异的大小也影响着智能体的“幸福感”,差异越小,智能体(包括人类)越能处于低能耗状态,获得更高的舒适度,但过度追求无差异可能导致“信息茧房”,限制成长与进化。
五、软件的演进:从1.0到2.0及未来趋势
软件的发展历程可划分为软件1.0、过渡状态(软件1.5)和软件2.0三个阶段,每个阶段在策略、软硬件关系、工具链等方面呈现出不同特征。
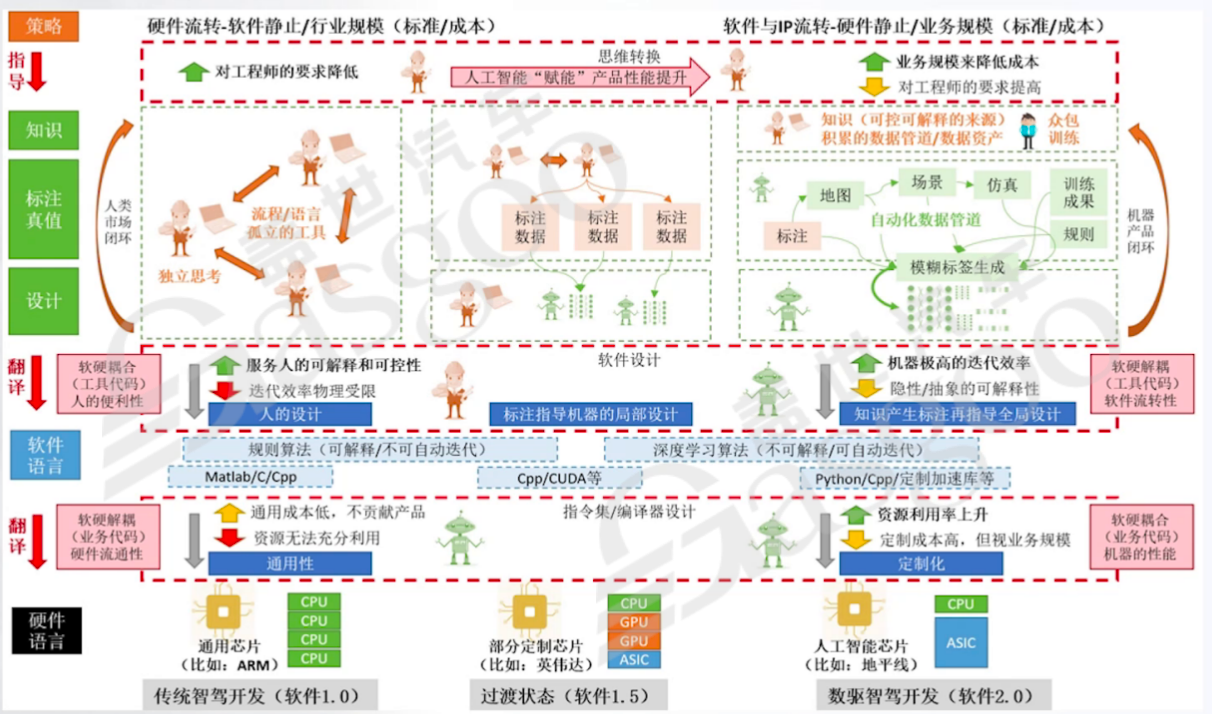
软件1.0以传统辅助驾驶开发为代表,采用“硬件流转-软件静止”的策略,注重通过行业规模效应降低成本。在这一阶段,软硬件呈现“设计与软件耦合、软件与硬件解耦”的特点:汽车行业通过低代码工具实现设计到软件的自动化转换,工具化程度高,但软件可在通用芯片上自由迁移,与硬件剥离。开发依赖工程师的经验与规则算法,迭代效率受物理条件限制,资源利用率较低。
软件1.5是过渡阶段,融合了部分软件2.0的特征,采用“软件与IP流转-硬件静止”的策略,以业务规模驱动成本降低。此时,硬件开始出现通用芯片与定制芯片并存的情况,工具链逐渐引入自动化数据管道,标注工作部分由机器承担,软件与硬件的耦合程度较软件1.0有所提升,迭代效率也随之提高。
软件2.0以数据驱动辅助驾驶开发为核心,强调软件与硬件的深度耦合,算法与芯片相互适配,以实现极致的性能与效率。策略上通过业务规模降低成本,对工程师的要求显著提高,需具备数据处理、模型训练等能力。开发依赖深度学习算法与自动化数据管道,知识积累以数据资产的形式存在,迭代效率极大提升,软硬耦合程度达到新高度。
未来,软件架构可能向模拟芯片与生物芯片方向演进。这类芯片放弃了部分通用性,硬件与软件的分层被大幅压缩,虽牺牲了可扩展性,但显著降低了能耗,提升了效率,如同人类生物体的结构特征。这种演进趋势意味着行业将在通用性与效率之间寻求新的平衡,为智能化规模的扩大提供可能。
从东西方文明的视角来看,西方文明的精确性与分层设计更贴合传统芯片与软件1.0、2.0的发展模式,而东方文明的模糊性与师徒传承模式,则与模拟芯片、生物芯片的理念存在相似之处。随着智能化的深入,两种思维将相互影响,共同推动汽车“思维”架构的创新。
智能汽车行业正经历从机械产品向智能体的深刻变革,这种变革涉及方法论、架构设计、思维模式等多个维度。从设计范式的迭代到架构的演进,再到“思维”模式的重构,每一步都体现了行业对效率、智能与用户体验的不懈追求。
未来,随着技术的持续突破,汽车将更加智能化、个性化,软件与硬件的融合将愈发紧密,能耗与效率的平衡将成为核心课题。同时,行业也需在通用性与专用性、标准化与灵活性之间找到最佳平衡点,以适应快速变化的市场需求与技术趋势。对于从业者而言,理解并把握这些变革趋势,不断提升自身能力,将是在智能汽车时代立足的关键。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




