MIT发明深度学习系统 仅使用单个摄像头即可教会仿生软体机器人移动

传统机器人,例如用于工业和危险环境的机器人,易于建模和控制,但过于僵硬,无法在狭窄空间和不平坦地形中操作。柔软的仿生机器人则更善于适应环境,并在其他难以触及的地方进行操控。然而,这些更灵活的功能通常需要一系列机载传感器和针对每个机器人设计量身定制的空间模型。
图片来源: 期刊《Nature》
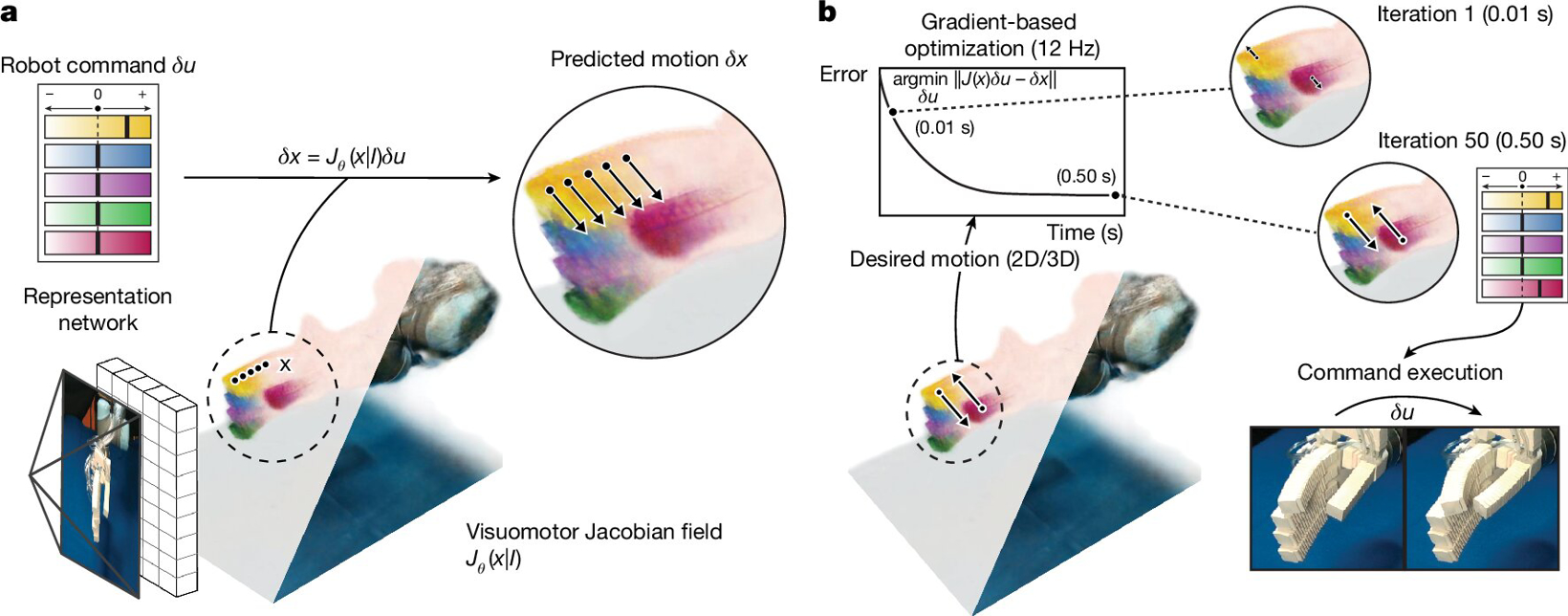
据外媒报道,麻省理工学院(MIT)的研究人员采用一种全新且资源需求更低的方法,开发了一种复杂程度更低的深度学习控制系统,该系统只需一张图像就能教会柔软的仿生机器人移动并执行指令。相关研究成果发表在期刊《Nature》上。
研究人员利用两到三个小时的机器人执行随机指令的多视角视频训练深度神经网络,使其能够仅凭一张图片重建机器人的形状和活动范围。
之前的机器学习控制设计需要专家定制和昂贵的动作捕捉系统。由于缺乏通用控制系统,它们的应用受到限制,并且使快速原型设计的实用性大大降低。
研究人员在论文中指出:“我们的方法将机器人硬件设计从手动建模的束缚中解放出来,而这在过去意味着精密制造、昂贵的材料、广泛的传感能力以及对传统刚性构件的依赖。”
新的单摄像头机器学习方法已在各种机器人系统的测试中实现了高精度控制,包括3D打印气动手、柔软的拉胀腕、16自由度Allegro手和低成本的Poppy机械臂。
这些测试成功实现了关节运动误差小于3度,指尖控制误差小于4毫米(约0.15英寸)。该系统还能够补偿机器人的运动和周围环境的变化。
“这项研究标志着机器人编程向机器人教学的转变,”博士生Sizhe Lester Li在麻省理工学院(MIT)的一篇网络专题文章中指出。“如今,许多机器人任务需要大量的工程和编码。未来,我们设想向机器人展示如何操作,并让它自主学习如何实现目标。”
由于该系统仅依赖视觉,它可能不适合执行需要接触感知和触觉操控的更灵活的任务。在视觉提示不足的情况下,其性能也可能会下降。
研究人员建议,添加触觉和其他传感器可以使机器人执行更复杂的任务。此外,它还有可能实现更广泛的机器人自动化控制,包括那些内置传感器极少或没有内置传感器的机器人。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。