北汽研究总院:组合辅助驾驶开发实践

2025年7月22日,在第八届智能辅助驾驶大会上,北汽研究总院智能辅助驾驶专业总师徐志刚分享了北汽研究总院在组合辅助驾驶上的开发实践。他指出,当前辅助驶系统配置与车型售价紧密相关,辅助驾驶配置正持续下探,同时用户需求呈现差异化,对辅助驾驶和智能座舱的关注度因车型而异。面对未来严格的L2级法规,车企需从价格驱动转向安全引领,提升产品准入门槛。
徐志刚提到,北汽研究总院正重新解构与重塑现有产品解决方案,探讨纯视觉、激光雷达及4D毫米波雷达等方案在不同场景下的适用性。同时,明确产品性能下限和竞争力起点,基于场景化需求创新用户体验。面对算力需求的增长,北汽研究总院正探索舱驾融合方案,并已在中高端车型上实现座舱与驾驶域的融合应用。

徐志刚|北汽研究总院智能辅助驾驶专业总师
以下为演讲内容整理:
发展趋势
以下为行业概况介绍,相关内容系根据行业公布数据整理而成。首先是基于2025年上半年TOP 20车型产品绘制的分布图,其呈现出的格局颇具研究价值。分布图两端以新能源车型为主,中间区域则为燃油车与混动车型。从智能驾驶系统配置情况来看,其与车型售价及定位密切相关。售价12万元以上车型多配备城市NOA功能;售价处于12万元至8万元区间的车型,主要搭载高速NOA功能;售价低于8万元的车型,则以L2 ADAS APA功能为主。然而,受今年上半年各车企、品牌间激烈竞争的影响,辅助驾驶配置正持续下探。
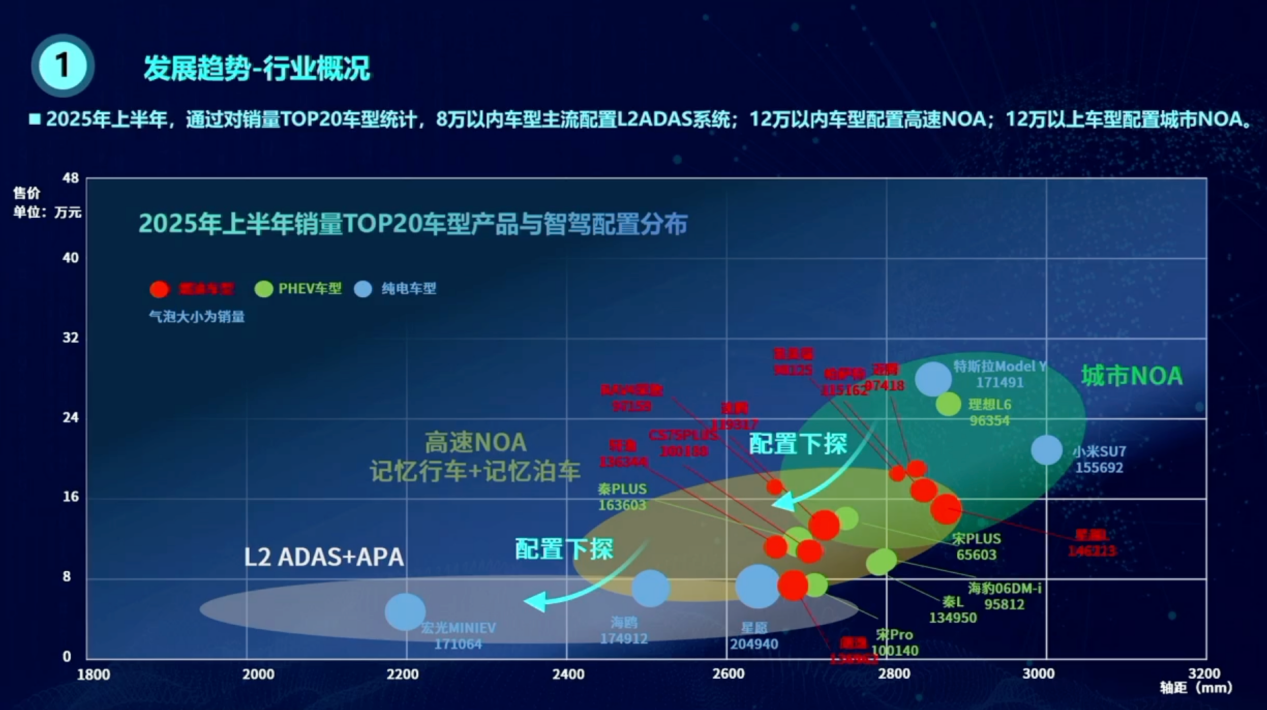
图源:演讲嘉宾素材
从用户需求层面分析,智能化因素在用户购车考量中位居第二。在辅助驾驶与智能座舱这两方面,用户关注度均位列前茅,不过不同车型的用户关注点存在差异。经调研发现,对于越野车型,用户对智能座舱的需求高于辅助驾驶;而对于其他车型,用户对辅助驾驶的关注度则超过智能座舱。可见,用户需求呈现出差异化特征,这对我们后续发展提出了差异化挑战。
面临挑战
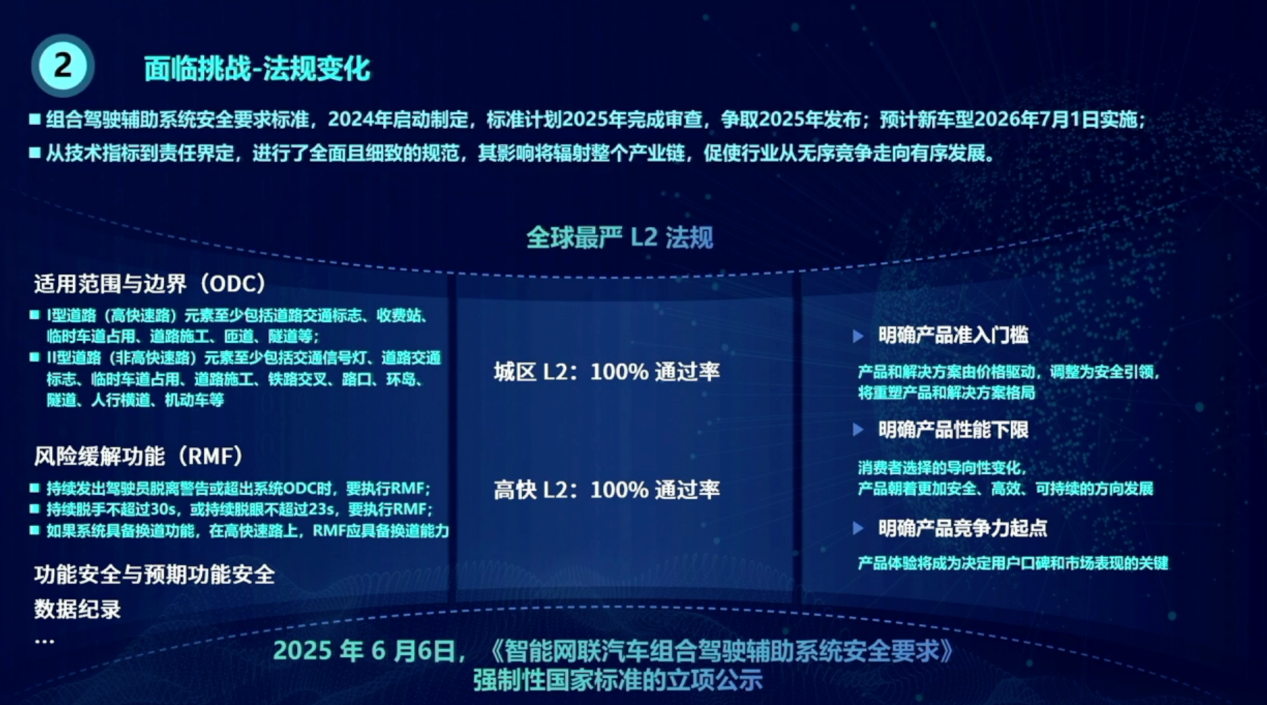
当前我们所面临的挑战之一在于未来法规的变动。2026-2027年期间,工信部与标准法规委员会编写的辅助驾驶安全要求相关法规或将强制推行,届时我国可能迎来全球最严格的L2级法规,这既是挑战,也是机遇。从适用范围与边界(ODC)来看,法规将L2级辅助驾驶分为城区L2和高速L2,均属强制要求范畴。
另外还有风险缓解功能(RMF),这是未来需重点发力的方向。此外,功能安全、预期功能安全以及数据记录等方面也不容忽视。本次法规对技术指标和责任界定作出了极为详细的规范,其影响将波及整个行业。未来产品准入门槛提高,产品解决方案的导向从价格驱动转变为安全引领。我们正积极针对法规要求探寻新的解决方案,力求以高性价比方案满足从低端到高端各车型的需求。
图源:演讲嘉宾素材
当前我们正对现有产品解决方案进行重新解构与重塑。其中涉及的关键问题包括,纯视觉方案能否满足所有场景及目标检测要求,例如在面对纸箱、夜间施工等复杂场景时,其覆盖难度极高;还有是否必须引入激光雷达才能解决上述要求,或者采用4D毫米波雷达是否也能满足这些场景需求。
其次,需明确产品性能下限。通过法规变化,可观察到一个显著趋势,消费者的选择将不再单纯依赖车企宣传,而是更多地受强制法规引导,产品也将朝着更安全、高效和可持续的方向发展,因为法规为其提供了基本保障。
此外,需明确产品竞争力的起点。法规并非终点,而是起点,它为车企设定了性能下限要求。在此基础上,我们应思考如何打造更优质的产品。我们认为,应基于场景化需求,在用户体验方面进行创新,这才是持续提升产品竞争力的出发点。产品体验将成为影响用户口碑和市场表现的关键因素。
从用户痛点来看,基于当前架构端的认知,原有功能呈现独立且割裂的状态,开发过程亦为链式模式。我们认为,各域均依据自身对用户需求的拆解,独立开展开发工作。在此模式下,各功能域之间的交融与融合程度较弱。然而,为提升用户体验、满足用户需求,我们正在调整开发范式,推动其从割裂状态向融合状态演进,并搭建了数据、算力、算法等各层级架构,以支撑上层场景化用户体验的创新。
还有一大要点是基础支撑,虽聚焦于算力,但实则涉及以芯片和算力为基础驱动的整个平台,推动全栈层面的变革。当前面临的挑战在于,随着安全要求和用户需求的日益提升,预计到2025年,算力平台将从5000T向2000T的区间演进;至2027年,则将形成2000T - 3000T的规模需求。以特斯拉现有如Hardware 5.0所推方案为例,其算力需求已接近2000T。此外,各车企正积极布局L3级系统的开发,从L3级系统开发角度而言,需考虑算力冗余,还需部署更大规模的模型,且模型参数量正呈指数级增长。因此,我们认为算力需求十分庞大。
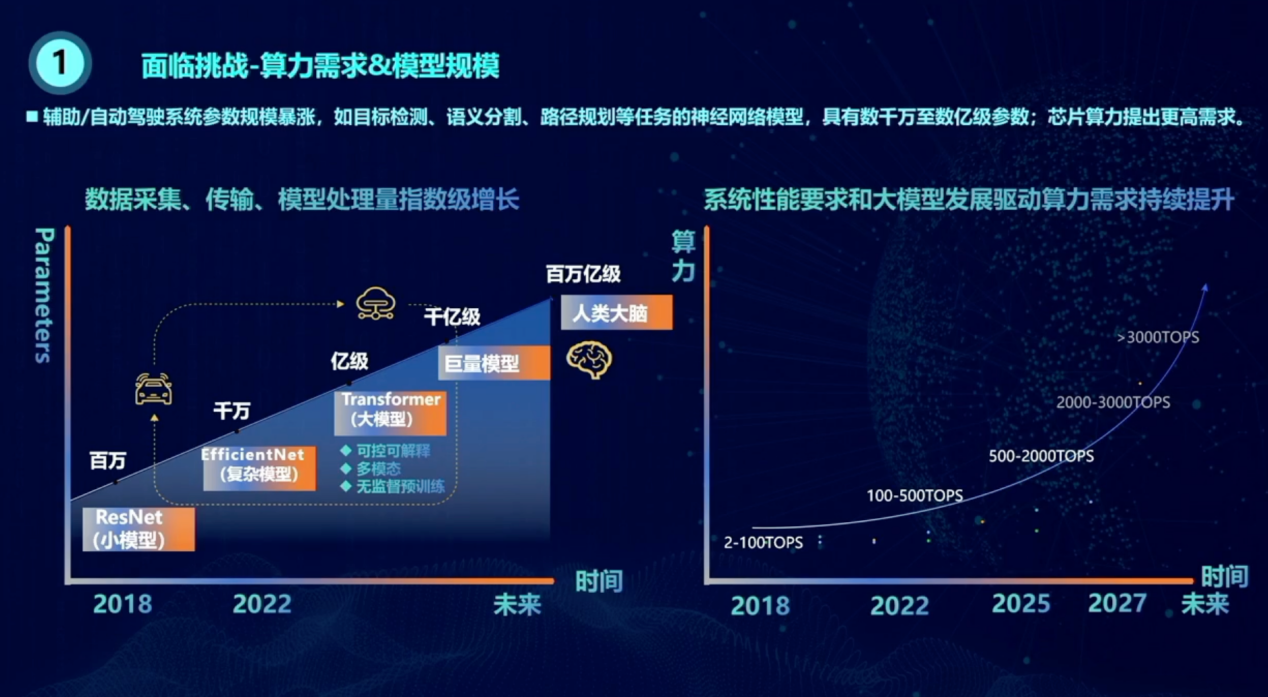
图源:演讲嘉宾素材
在此过程中,面临的挑战之一在于开发过程中如何管控庞大的算力需求以及资源调度。特别是在采用舱驾融合技术路线时,如何在座舱、舱驾、控联等不同域之间实现算力的有效调度,是至关重要的挑战。
应用实践
在应用场景定义方面,我们仍以P to P场景定义为基准开展工作。我们将用户需求细分为多个切片,并据此衍生出多样化的应用场景,以打造优质的用户体验。同时,我们依托基础底座来支撑场景化需求。
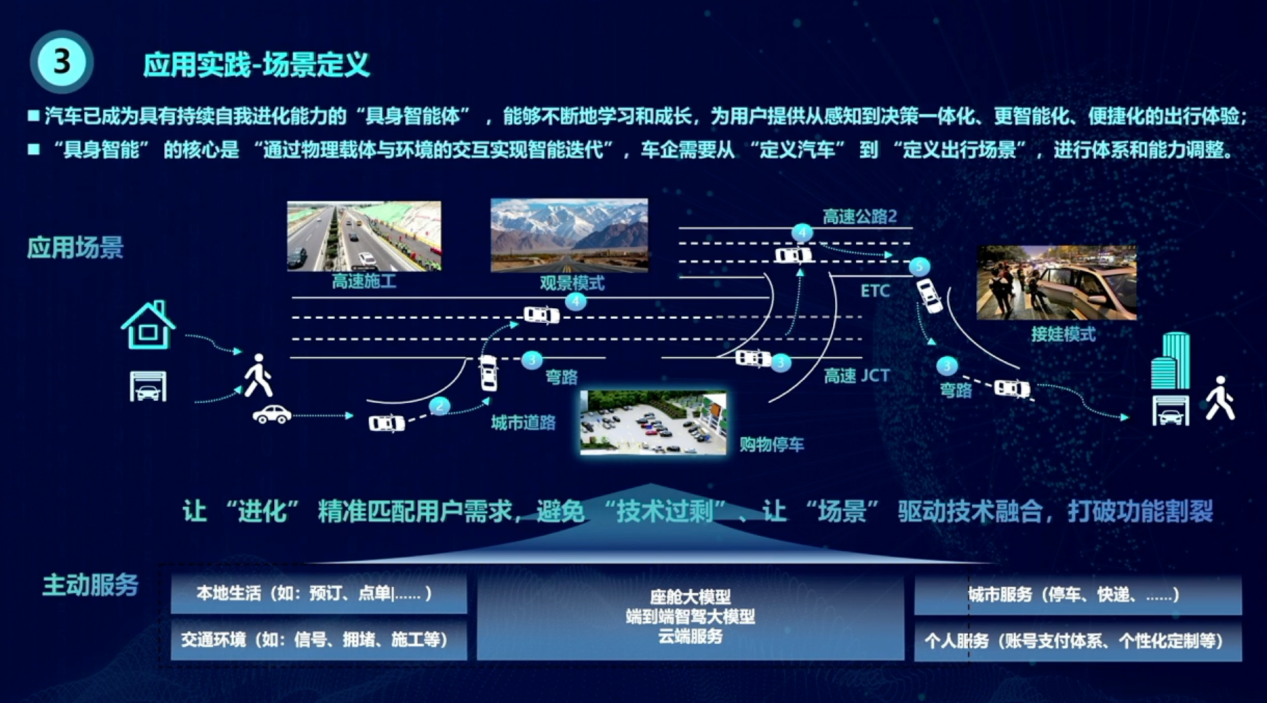
图源:演讲嘉宾素材
关于解决方案的思考,我们基于安全因素考虑,未来低阶方案将主要聚焦于基础安全。实际上,目前大部分现有解决方案已能满足基础安全需求。例如,为应对静止车辆目标,目前AEB要达到满分需在80公里时速下实现有效制动。未来若强制标准提高,现有AEB性能水平能否持续提升,并作为基础安全方案为后续车型赋能,这将是一个值得关注的变化。
另一项变化在于,为满足新法规要求,针对L2高快和L2城区,需打造全新平台并探索新的解决方案。据评估,该平台算力需求大致在100T至500T之间,方能满足后续性能体验要求,其中存在算力下限与上限的考量。基于安全因素,作为中高端车型的标配功能,需优先实现技术突破,随后逐步平衡安全性与性能,以达到驾驶性价比标准。针对差异化用户体验需求,可在现有解决方案基础上进一步提升性能。面向2027至2028年L3级自动驾驶系统开发需求,算力需求预计将超过500T。实际上,体验升级与成本优化是指导平台规划的核心原则,亦是用户需求在整车及辅助驾驶系统开发中的关键导向。
架构层面,我们正探索采用舱驾融合方案以应对后续用户需求。目前,已在中高端车型上实现座舱与驾驶域的融合应用,相关产品已接近量产阶段。下一步计划将车控、底盘及动力系统等各域进行进一步融合,向中央计算中心架构布局,此为架构层面的应对策略。
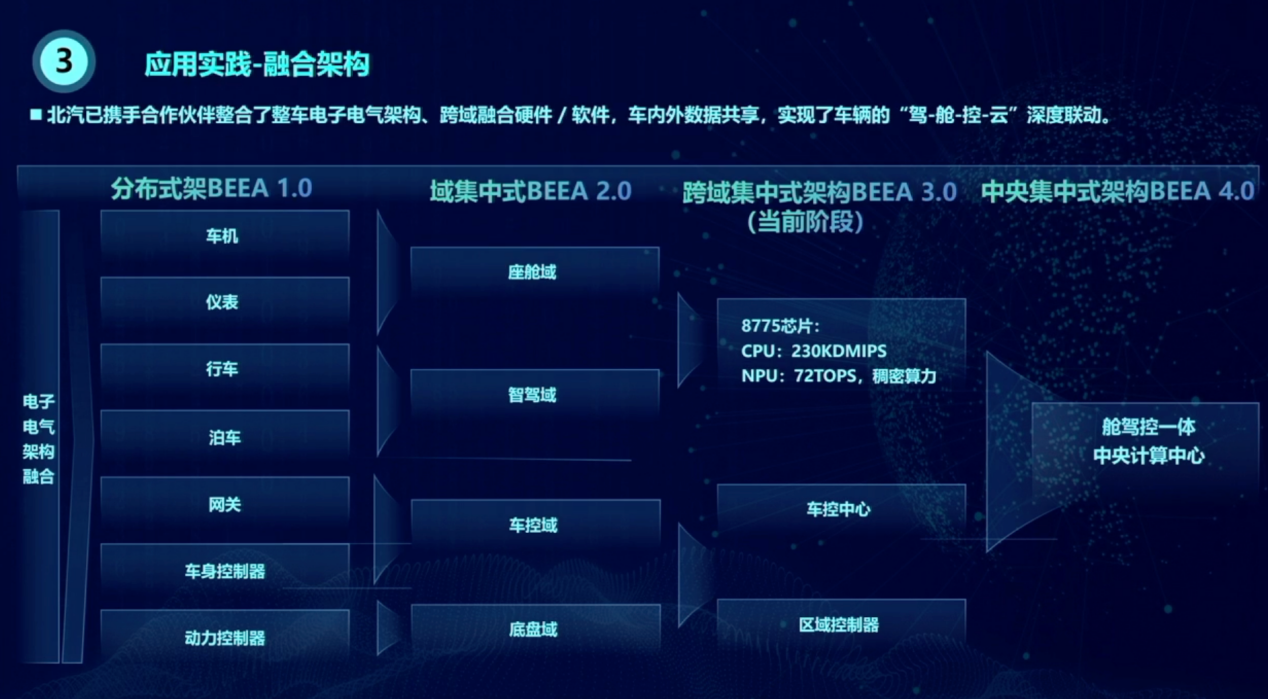
图源:演讲嘉宾素材
从算法引领的角度来看,对于辅助驾驶技术,后续我们将按照CNN、BEV OCC、端到端,最终向VLA方向进行演进。在基础能力构建方面,包括生态系统与支撑底座的布局,也将遵循这一技术路径展开。目前,端到端算法的开发工作正在推进中。
模型训练方向亦是重中之重。当前,我们正按照“三步走”战略进行布局,且该战略已进入实施阶段。
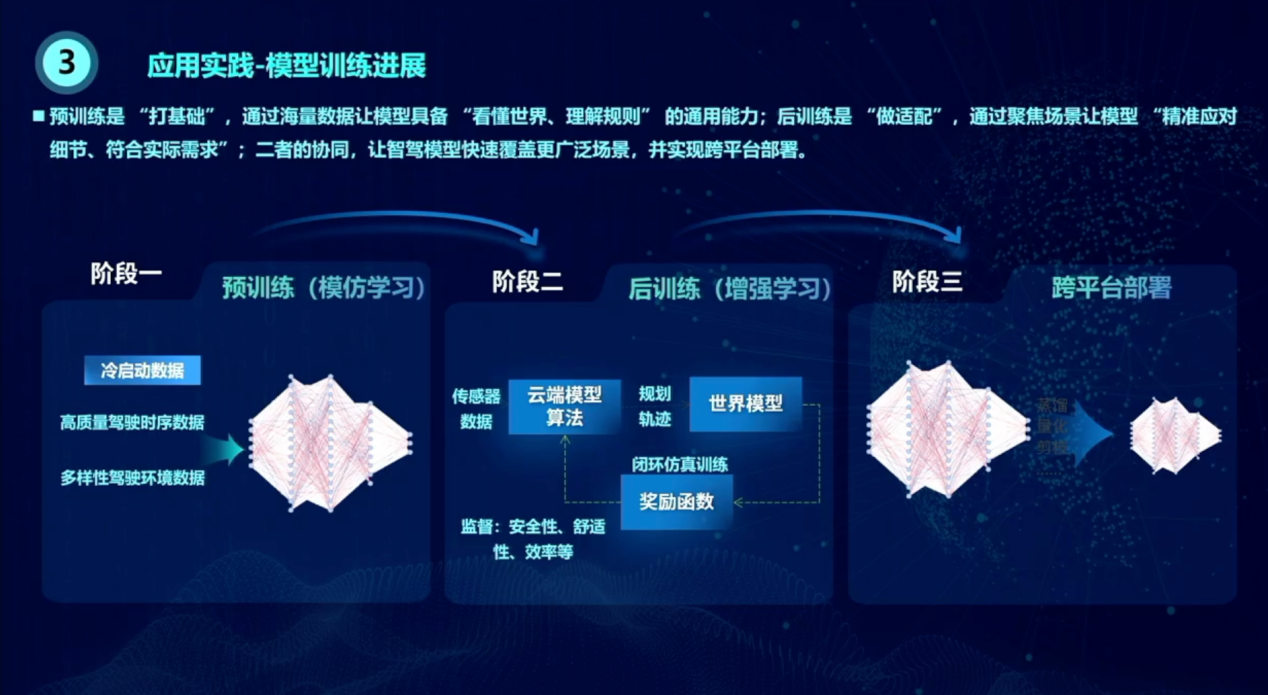
图源:演讲嘉宾素材
技术生态搭建上,我们将围绕数据、算法、算力三大核心要素展开,后续整个智能驾驶技术生态体系将主要聚焦于关键技术的自主可控,以满足车型研发需求。正所谓“有所为,有所不为”,从我们的角度出发,仍需明确技术聚焦点,实现技术路线的收敛。
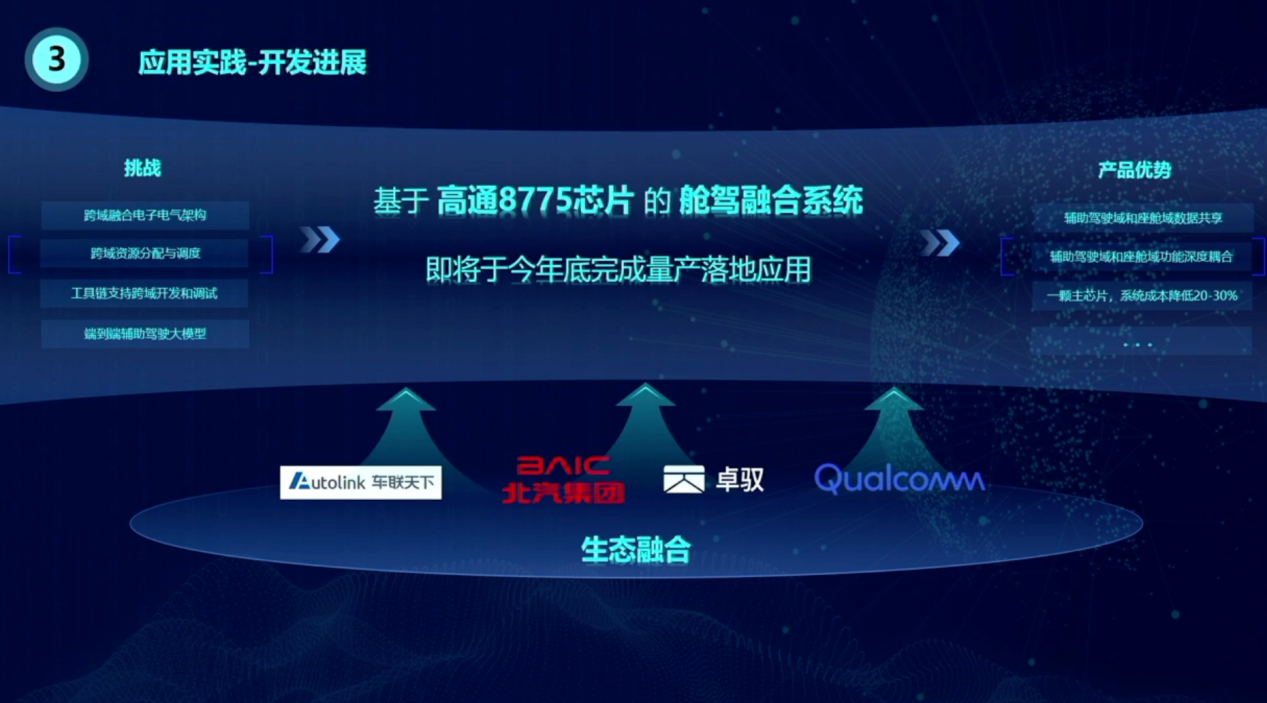
下图是我们取得的一项实际成果,基于8775舱驾融合技术,与高通联合发布了该产品。此产品为目前行业内首个舱驾融合、舱驾一体的解决方案。
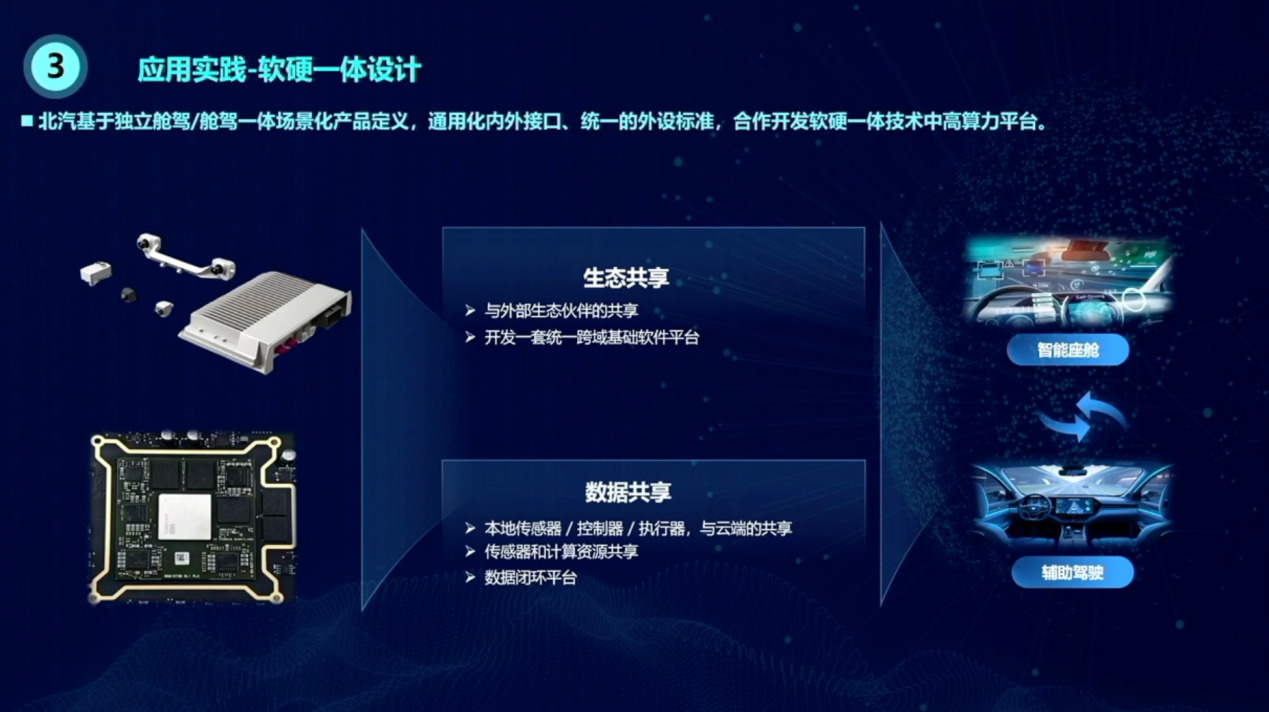
图源:演讲嘉宾素材
在高速NOA以下场景,我们已全面掌握自研能力,并为各车型提供了相应解决方案,目前正于自有车型中持续迭代与推广。
此外,我们与车联、卓驭共同打造的舱驾融合产品,计划于今年年底实现量产并落地应用。
图源:演讲嘉宾素材
未来展望
从多域融合的发展趋势来看,我们将着力打造灵智智能体。面向2030年,我们期望能够打通车内、车外两个域,实现车与家的无缝连接,并通过算力、数据与算法的协同,推动系统基于安全与高效原则持续迭代演进。
(以上内容来自北汽研究总院智能辅助驾驶专业总师徐志刚于2025年7月22日在第八届智能辅助驾驶大会发表的《组合辅助驾驶开发实践》主题演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。