
韩国研发可编程机器人薄片 可变形、移动、抓取物体

据外媒报道,在自适应机器人技术飞速发展的背景下,韩国科学技术院(Korea Advanced Institute of Science and Technology,KAIST)研发出一种可编程机器人薄片,可变形、移动,还能抓取物体,而且无需机械铰链或外部结构重组。该项创新有望为实现能够实时适应环境变化的下一代机器人铺平了道路。
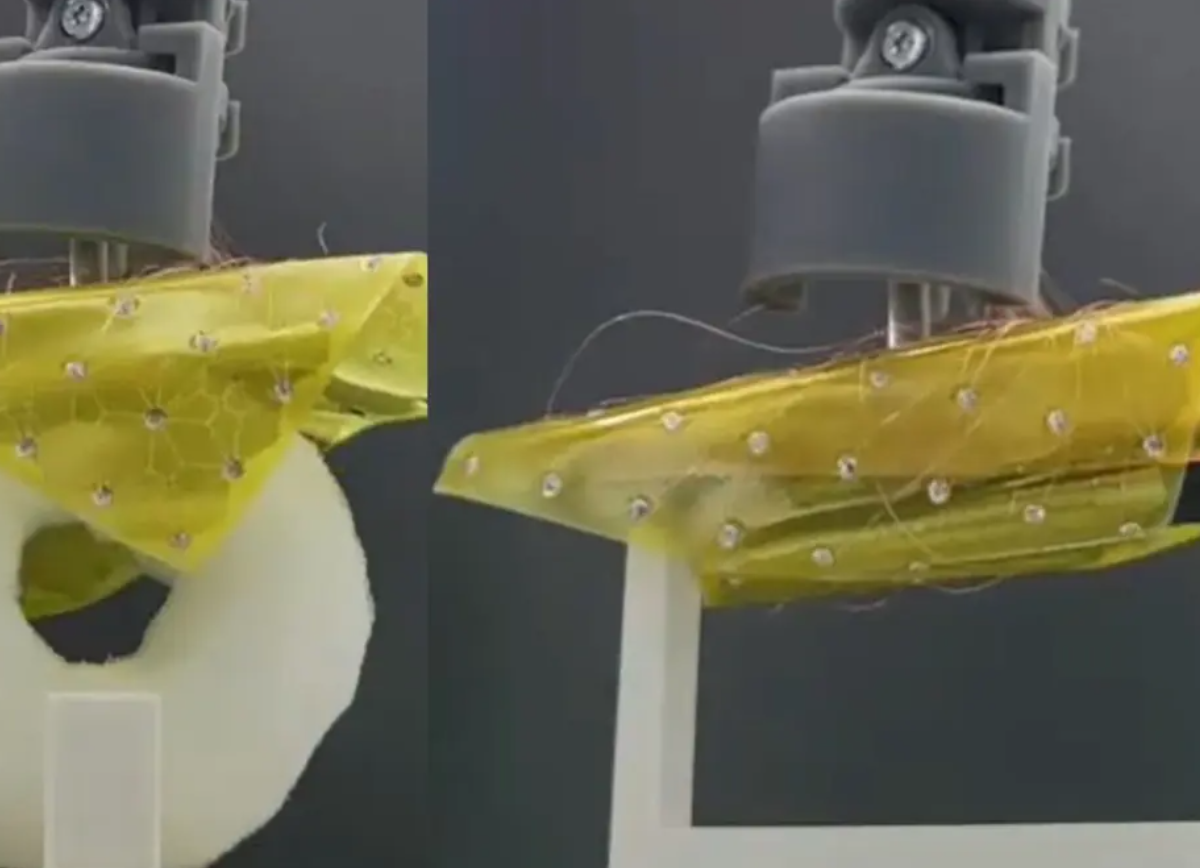
机器人薄片(图片来源:KAIST)
该研究团队由KAIST机械工程系的Kim Jeong教授和Park In-kyu教授共同领导,成功发布了一项名为“可现场编程的机器人折叠片”(field-programmable robotic folding sheet)的创新技术。该技术融合了物理人工智能与软件控制的可重新编程功能。这一突破性成果为机器人领域长期存在的难题——如何构建能够根据任务或环境变化灵活调整形态的系统,且无需每次重新构建或设计——提供了有效的解决方案。
无固定铰链的折叠设计
基于折叠的变形机制多年来一直是机器人技术中的首选策略,其灵感来自于折纸艺术,因而高效且直观。但是,传统系统依赖于预先设计的铰链和固定的折叠路径,限制了灵活性与适应性。
KAIST研究团队设计了一款薄且柔韧的聚合物薄片来解决该难题,而且该薄片中嵌入了高密度的金属电阻器网络。此类电阻器兼具加热器和传感器的功能。当材料受热时,会发生弯曲;在冷却后则能够恢复原状。此种双重功能网络让该薄片能够折叠、监控并校正其动作,且无需依赖外部传感器或执行器。
与早期需要物理方式重新配置以切换任务的系统不同,此种机器人薄片能够响应软件指令。用户可以使用一个简单的界面即时重新编程形状、折叠位置和方向。然后,该薄片会自动执行此类指令,并利用实时温度反馈来保证精度。
研究人员打造了一款面积为40平方厘米的机器人薄片原型,嵌入了308个电阻单元,展示了该项技术的潜力。研究人员对其进行了编程,使其具备行走、爬行,甚至能够抓取培养皿和木棍等物体的能力。该原型实现了-87°至109°的折叠角度,并能在30°C至170°C的宽温度范围内正常工作。
由人工智能技术驱动,实现高适应性
为了提升性能,该系统还集成遗传算法与深度神经网络。此类技术为折叠行为背后的决策过程提供动力,使其能够对各种输入信息做出适应性的响应。
此外,该系统进一步采用了闭环控制系统,通过校正环境变化(例如通常会损害基于热量的系统的温度波动),提升其输出性能。最终,该材料不仅能够变形,还能通过形状进行思考,研究人员将此特性称为“形态智能”。
在一项测试中,这种薄片被用作夹具,能够根据物体的形状调整其抓取力度。在另一项测试中,相同的材料能够像生物体一样爬行,模仿自然运动。Kim教授表示:“这项研究让我们在形态智能领域又迈进了一步,在这种智能中,机器人的形状成为其智能的一部分。”
该研究团队计划进一步优化薄片的承重能力、缩短冷却时间,并开发无需外部布线的集成电极。从长远来看,研究人员希望将该薄片转变为可用于灾害救援、个性化医疗设备,甚至太空探索的可部署人工智能平台。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




