南加州大学研发出MOTIF机械手 突破传统机器人手技术局限

在成长过程中,人类学会恰到好处地用力推动箱子,避免徒手触碰滚烫的锅具。如今,一款具备这些本能的机械手已然问世。
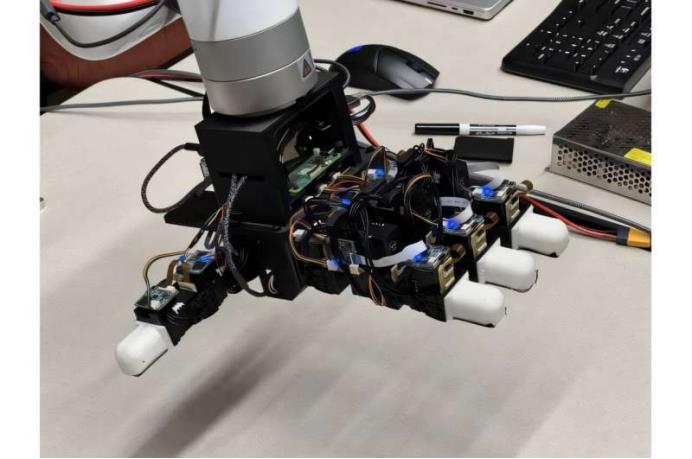
图片来源:南加州大学维特比学院(USC Viterbi)
据外媒报道,由学生团队与南加州大学维特比学院(USC Viterbi)计算机科学助理教授Daniel Seita合作开发的MOTIF机械手(MOTIF Hand),基于多模态理念构建,具备多种感知能力。其中最突出的能力涉及温度与力觉,内置的深度、力觉和温度传感器使机械手能够感知并响应这些因素。这些特性不仅为机器人手的研究开辟了新前景,更能通过避免温度损伤延长设备使用寿命。其力学感知能力在现实应用中也展现出意想不到的实用价值。
“在工厂等场景中,机器人需要推送物体至目标位置,这要求精确测量作用力,”Seita解释道,“此类力传感器能确保机器人施加恰当力度。”他补充道:“此前尚未见有人开发过此类机械手。”
MOTIF机械手基于卡内基梅隆大学(Carnegie Mellon University)研究团队2023年研发的LEAP机械手基础构建。MOTIF的核心突破在于新增了类人感知能力。Seita表示,这款具备更精准类人特征与功能的机械手可应用于工厂作业、烹饪乃至焊接等众多领域。
该机器人的温度感知能力源于掌心内置的热成像摄像头。Seita与南加州大学维特比学院研究生团队致力于打造能模拟人类温度感知的手部装置。
“烹饪时遇到滚烫的锅具,我们会先用手探测是否安全再触碰,以避免烫伤,”Seita解释道,“我们希望将这种直觉转化为机器人系统。”
该研究论文《MOTIF机械手:搭载热成像、惯性及力传感器的多模态观察机器人手》的合著者Hanyang Zhou指出,这种直觉系统要求手部需靠近待测物体表面。该论文已发布于arXiv预印本服务器。
“我们当时在思考:是否存在某种方式能获取信号却无需接触任何物体?于是我们直接在掌心嵌入了一台红外摄像机。”Hanyang Zhou补充道。
换言之,MOTIF机械手能通过这台热成像摄像机检测温度,甚至无需接触物体,只需将手掌靠近摄像机进行扫描即可完成任务。
Seita、Zhou及其团队的研究旨在让温度和力感的测试过程更自然,换言之,更贴近人类对这些事物的真实体验。例如,力是人类无法看见、只能感知的事物。MOTIF机械手的设计理念源于人类感知力的核心机制,即通过物体重量等力学属性传递的触觉反馈,从而实现更逼真的机器人力学响应。
“人类无法通过视觉辨别力,必须依靠触觉感知。但机器人手如何实现这一点?”Zhou提出疑问,"当我不确定水瓶是否装满时,只需轻轻一弹。我肯定会摇晃它,对吧?"
MOTIF机械手内置的惯性测量单元(IMU)传感器将这种简单测试引入机器人领域。这只仿生手如同人类手掌般,仅需轻弹或摇晃物体即可判断其重量。
为推动这项感知技术进一步发展,Seita及其团队承诺也将MOTIF机械手开源。“开源研究成果对推动学术界进步至关重要,”Seita表示,“使用我们机械手的人越多,对研究越有利。”
Zhou将MOTIF机械手的感知技术突破称为“平台”,期待整个机器人学界未来能在此基础上持续创新。“只要研究团队对这个平台感兴趣,我们就应让它变得更易获取、更易使用。”Zhou强调道。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。