受自然启发 北理工新导航系统帮助机器人无需GPS即可穿越复杂环境

机器人很快就能自主完成搜救任务、巡检、复杂的维护作业以及其他各种现实世界的任务。然而,要做到这一点,它们必须能够在未知且复杂的环境中平稳导航,避免发生故障或陷入困境,否则就需要人工干预。
大多数自主导航系统依赖于全球定位系统(GPS),它可以提供机器人在地图上的位置信息。然而,在许多环境中,例如洞穴、非结构化空间和倒塌的建筑物,GPS系统要么无法工作,要么变得不可靠。
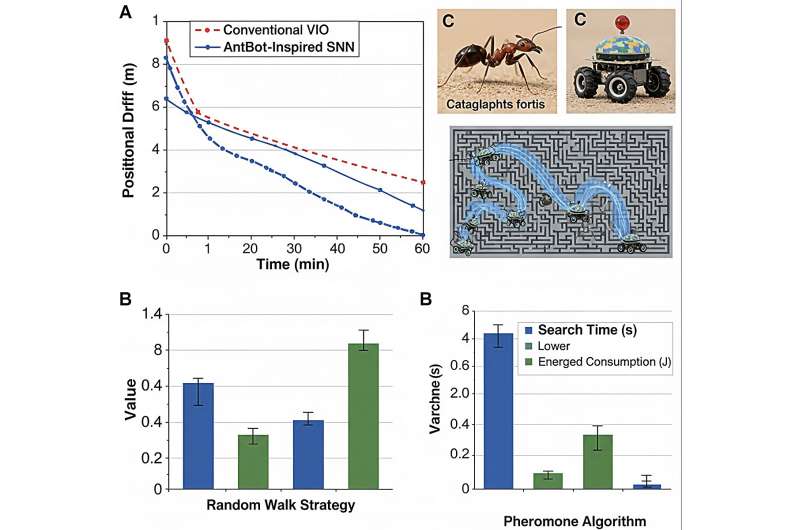
图片来源:(2025). DOI: 10.2139/ssrn.5674916
据外媒报道,北京理工大学(Beijing Institute of Technology)的研究人员近期开发了一种新型的仿生系统,该系统无需依赖GPS技术,即可提升机器人在非结构化和复杂环境中的导航能力。其灵感来源于昆虫、鸟类和啮齿动物身上观察到的三种不同的生物导航策略。相关论文目前可在SSRN预印本服务器上获取。
“我们的研究源于我们在仿生机器人领域发现的一个关键空白,”论文第一作者Sheikder Chandan表示,“虽然许多研究已成功地从单个动物中分离并实现了导航策略,例如蚂蚁的路径整合或老鼠的认知地图构建,但这种还原论方法忽略了一个被称为‘简并性’的基本生物学原理。在自然界中,稳健的导航源于多种不同但功能重叠的策略的层级整合。”
一个由三部分组成的、受自然启发的框架
Chandan和他的同事们并没有开发一个受特定动物类别中观察到的单一导航策略启发的系统,而是希望创建一个统一的神经形态框架,借鉴多种物种的导航方式。最终,他们成功地模拟了昆虫、鸟类和啮齿动物的导航生物过程。
“我们的目标是将这三类动物中最有效的导航策略整合到一个系统中,从而直接解决传统导航的核心局限性,例如感觉脆弱和高能耗,尤其是在充满挑战且缺乏GPS信号的环境中,”Chandan说道。
因此,该团队的框架包含三个主要的仿生组件,它们共同支持机器人的导航。这三个组件分别是:昆虫仿生路径积分器、鸟类仿生多传感器融合系统和啮齿动物仿生地图构建系统。
“首先,昆虫仿生路径积分器是基于低功耗神经形态硬件构建的脉冲神经网络,它充当稳健的内部步数计数器,用于以自我为中心的跟踪,”Chandan解释道。“鸟类仿生多传感器融合系统则模仿候鸟如何利用多种线索,使用贝叶斯滤波器动态地融合来自量子磁力计、偏振罗盘和视觉的输入,从而确保即使某个传感器失效,也能可靠地确定航向。”
第三,受啮齿动物启发的认知地图系统通过仅在检测到显著地标时更新地图来创建空间记忆,这与大脑海马体的能量效率相仿。
为了评估这种自然启发式框架的潜力,研究人员使用23种不同的机器人平台进行了广泛的实地试验。这些试验在复杂的真实环境中进行,包括废弃矿井和茂密的森林。
“该系统与传统的SLAM(即时定位与地图构建)系统进行了基准测试,结果显示其位置漂移减少了41%,能量效率提高了60%,并且能够以快83%的速度从传感器故障中恢复,”Chandan表示。“它的独特优势在于‘简并性’——当一个组件出现故障时,其他组件可以无缝接管,从而提供孤立系统所缺乏的容错能力。”
性能提升及潜在应用
在初步的现场测试中,该研究团队开发的架构取得了显著成果,使各种机器人能够成功地在非结构化和复杂的环境中导航。
“我们并非仅仅改进了单一算法;我们创建了一种全新的系统级范式,它本质上更具弹性,”Chanda说道。“从量化角度来看,这使得不同机器人平台的精度、能效和鲁棒性都得到了显著的同步提升。一个关键的演示是系统能够从传感器故障中快速恢复;当主摄像头失明时,它利用其他功能子系统,仅用了3秒多一点的时间就重新建立了精确定位。”
未来,Chandan及其同事开发的框架有望得到进一步改进,并部署到更多机器人系统上,使它们能够在不可预测的环境中可靠且自主地完成任务。此外,它还有望启发人们开发类似的机器人导航系统,借鉴各种动物的导航策略。
“这项工作为打造真正具备‘生态适应能力’的机器提供了一个正式的蓝图,这些机器能够在容不得半点故障的环境中长期运行,”Chandan说道。“这可以应用于灾难救援(例如在倒塌的建筑物中导航)、其他星球的行星探测以及深海任务等,在这些环境中,传统的GPS和完美的传感技术都无法发挥作用。”
研究人员目前正计划开展新的研究,旨在克服其框架中观察到的一些局限性。例如,他们希望整合片上学习和持续学习技术,使机器人的导航更加逼真、更具适应性。
“目前,我们系统的神经权重大多是预先配置的,但生物系统通过突触可塑性不断学习和适应,”Chandan补充道。“我们计划探索忆阻器突触等新兴技术,将这种能力直接集成到硬件中。此外,我们的目标是将系统扩展到公里级环境,这将需要开发更复杂的内存组织方案,以高效地处理更大的空间地图。我们的最终目标是创造出不仅模仿孤立动物行为,而且体现生物智能的持续学习和可扩展性的机器人。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。