圣地亚哥州立大学发明新计算机视觉框架 利用多摄像头图像分割技术提高道路安全性

改善繁忙路口的交通安全仍然是一项严峻的挑战,研究人员正超越传统的、延迟的事故数据,转而主动评估风险。据外媒报道,来自圣地亚哥州立大学(San Diego State University)的Shounak Ray Chaudhuri、Arash Jahangiri和Christopher Paolini提出了一种新的计算机视觉框架,该框架利用多个摄像头持续监控路口,并计算“侵入后时间”(Post-Encroachment Time),即车辆彼此跟随的紧密程度。这一创新系统能够实时处理图像,以厘米级的精度精确定位潜在危险,并生成高风险区域的动态热力图。
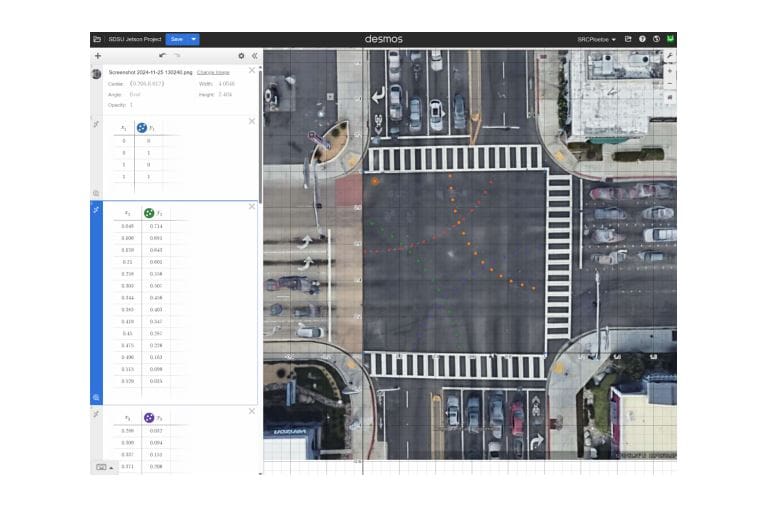
图片来源:arxiv.org
通过超越静态分析并利用分散式的视觉技术,这项研究展示了一种可扩展的、高分辨率路口安全评估的可复制方法,并为主动降低风险的智能交通系统铺平了道路。
车辆跟踪与近距离碰撞风险评估
本研究详细介绍了一种利用计算机视觉评估交通安全的系统。该系统采用深度学习模型,能够精确识别和跟踪视频中的车辆。系统计算“侵入后时间”(Post-Encroachment Time,PET),即车辆在另一辆车进入其行驶路径后避免碰撞所需的时间,并将其作为风险的关键指标。PET值越低,碰撞概率越高,系统能够识别近距离碰撞和潜在的危险情况。通过生成PET分布数据,系统能够识别PET值持续偏低的路段,表明这些路段需要进行安全改进,从而将被动式碰撞分析转变为主动式安全评估。
基于摄像头同步的实时交通安全评估
研究人员将该新型计算机视觉框架用于实时交通安全评估,并在加利福尼亚州的一个十字路口进行了演示。该研究利用了来自四个同步摄像头的实时数据,实现了连续的视觉覆盖,并在专用计算设备上处理每一帧图像。车辆检测采用了一种先进的分割算法,识别每个摄像头视野内的车辆。然后,利用精确计算的变换将检测到的车辆形状转换为统一的鸟瞰图,有效地融合了重叠的摄像头视图,提高了车辆定位的精度。该框架能够以亚秒级的精度高分辨率识别高风险区域,并有助于对交通模式进行长期监测和分析。
基于多摄像头视觉的实时危险区域测绘
该框架还利用四个同步摄像头持续监测车辆运动,并在专用计算设备上使用最先进的分割算法处理每一帧图像,以实现精确的车辆检测。检测到的车辆通过变换被转换为统一的鸟瞰图,从而对齐来自重叠摄像头的视图,并实现精确的车辆定位。一项关键成果是提出了一种新颖的像素级侵入后时间算法,该算法无需依赖固定单元格即可测量车辆位置,从而能够高精度地可视化危险区域,并更精确地识别近距离碰撞事件。
基于计算机视觉的实时交叉路口安全评估
通过在专用计算设备上处理摄像头视频流,该系统能够以亚秒级的精度高分辨率识别高风险区域,并高精度地测量车辆位置。尽管该系统在摄像头覆盖范围和手动配置方面存在局限性,但未来的工作将着重于改进摄像头索引策略,并减少手动校准的需求,以进一步提高系统的精度、可扩展性和易用性。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。