中美联合研究团队设计出新软体机器人 利用环境热量进行自主运动

只需温暖的手掌就能驱动微型沙门氏菌仿生机器人运动,这些机器人利用分子级动态键合技术。
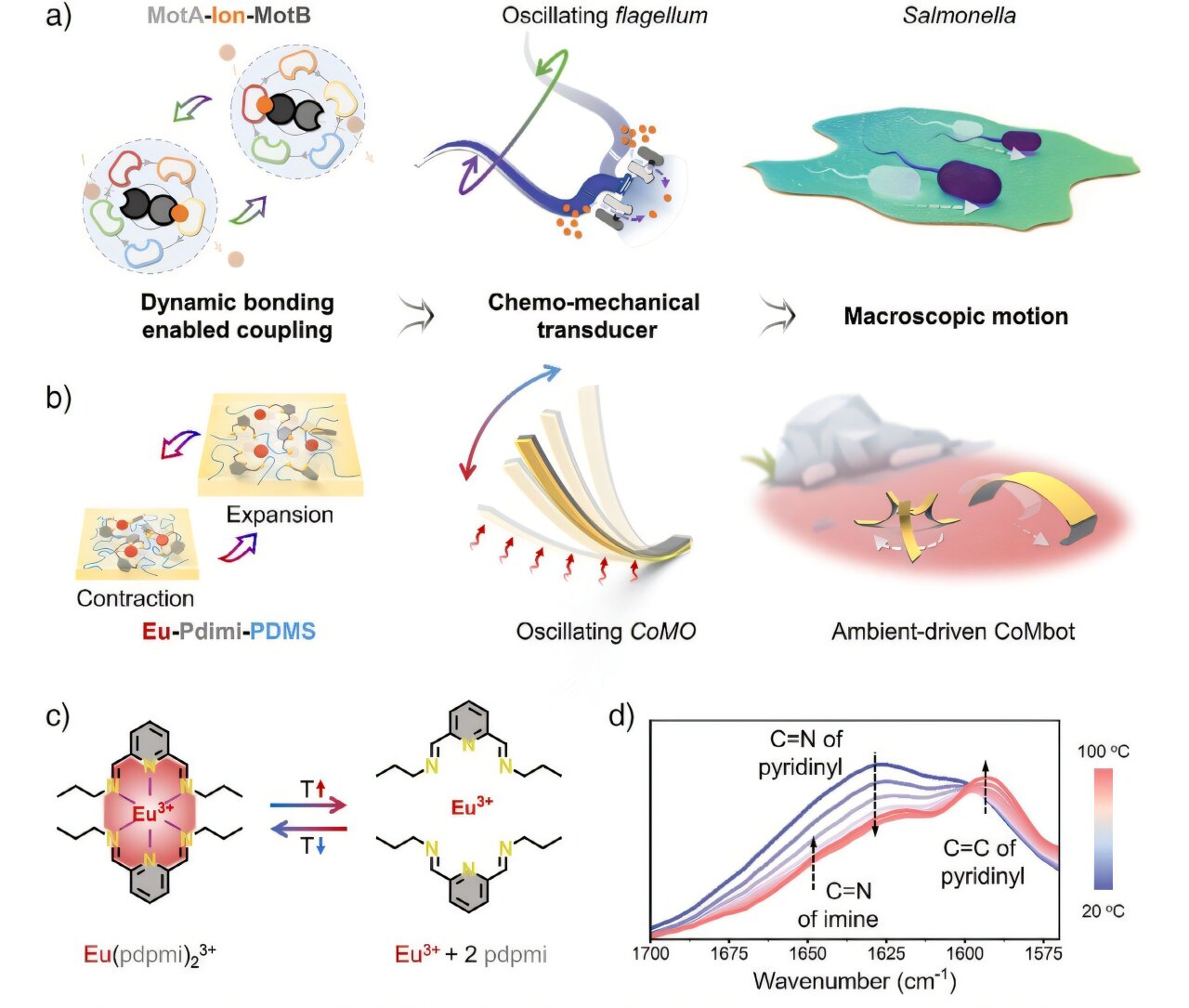
据外媒报道,来自中国和美国的研究团队合作设计了一种软体机器人,该机器人配备协调运动振荡器(CoMO),能够通过收集来自阳光或体温的微量能量来实现自持的微运动。这项创新的核心是一种新型超分子聚二甲基硅氧烷(PDMS)基弹性聚合物,其中心由Eu³⁺动态交联。该研究成果发表在期刊《Angewandte Chemie》上。
图片来源: 期刊《Angewandte Chemie》
受细菌启发
在分子层面,生物体将从周围环境中获取的能量或从食物中代谢的能量转化为运动。像软体机器人这样的人工系统需要大量的能量才能运动,例如电刺激、强激光或强力加热器。即使是依靠温差驱动的设计,通常也需要比我们日常环境中遇到的温度高得多的温度。
为了实现能够自我维持的无束缚软体机器人,研究人员需要能够利用环境能量并将其转化为运动的材料。
为了构建这样的系统,研究人员从沙门氏菌中汲取灵感,沙门氏菌的鞭毛通过动态离子结合持续运动。他们开发了CoMO,它利用类似的化学策略——键断裂和键形成的循环过程——来驱动其运动。这种将分子转变转化为连续微小机械运动的过程被称为化学-机械耦合。
巧妙避开热源
该团队设计的CoMO条带由两层组成:一层是商用纤维素纸的被动层,另一层是Eu(III)配位的橡胶状材料Eu-Pdimi-PDMS的活性层。活性材料的金属-配体交联经过精心设计,具有高度动态性、弱性和温度敏感性,使其在加热时可逆断裂,冷却时可逆重组。
加热时,活性层的膨胀倍数是其被动层的2000倍,从而将CoMO条带推离热源。随着条带向外移动,它开始冷却,Eu离子将PDMS聚合物链拉回,材料再次收缩。这种收缩使条带弯曲回热源方向,从而启动整个膨胀过程。
协调式电动机器人(CoMbot)即使在最高点和最低点之间的温差仅为约2°C时也能振荡——如此小的温差,传统热致动器甚至都不会做出反应。
CoMbot原型机在温度范围为30°C至100°C的不同加热表面上,连续稳定振荡超过4000次,持续5小时。仅在最初两小时后,其膨胀长度略有下降。
研究团队还发现,这种动态化学-机械耦合原理也适用于其他金属离子,例如Al³⁺和Zr⁴⁺。
通过收集温和的能量,这种材料可以为无需电池的软体传感器和机器人供电,用于在偏远的自然环境中进行环境监测。研究人员还认为,经过一些改进,CoMO材料可用于制造生物医学机器人,使其能够进入传统能源无法触及的生物系统。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。