研究人员发明亚毫米级机器人 能够感知、思考并自主行动。

能够自主穿梭于人体内修复受损部位的微型机器人,或许听起来像是科幻小说里的情节。据外媒报道,宾夕法尼亚大学(University of Pennsylvania)和密歇根大学(University of Michigan)的研究人员研发出一种尺寸小于一毫米的微型机器人,并配备了内置计算机和传感器,这种微型手术的愿景正一步步接近现实。相关研究论文已发表于期刊《Science Robotics》。
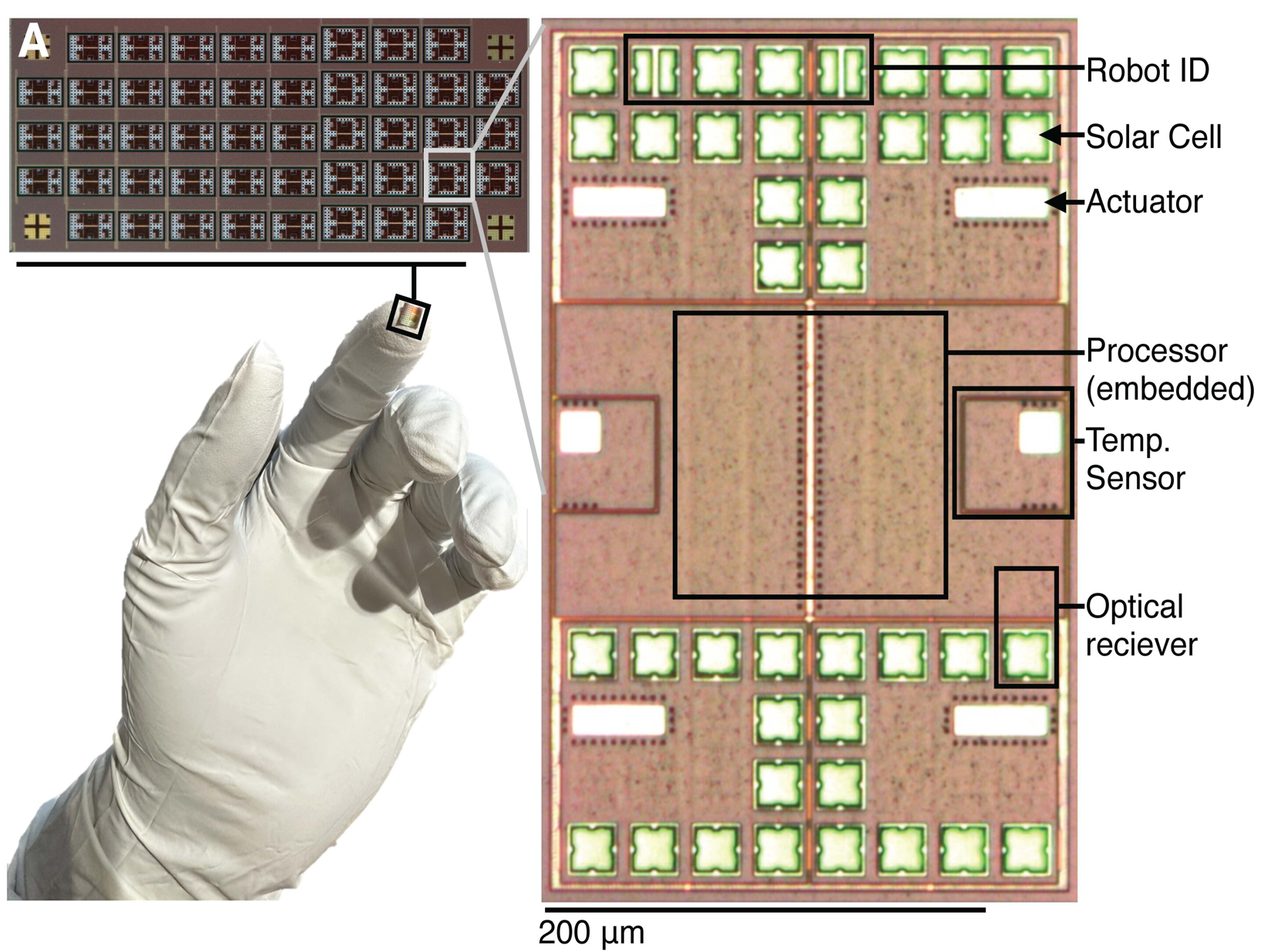
图片来源: 期刊《Science Robotics》
几十年来,科学家们一直致力于研发微型机器人,不仅用于医疗领域,也用于环境监测和制造业。然而,他们面临着巨大的挑战。现有的微型机器人通常需要大型的外部控制系统,例如强力磁铁和激光器,而且无法在陌生的环境中自主决策。
克服重重障碍
在论文中,该团队描述了他们如何克服重重障碍,最终创造出比一粒米还小的自主可编程机器人。
关键的突破在于,他们利用制造计算机芯片的半导体制造技术,将所需的计算能力直接集成到机器人本体上。这种名为互补金属氧化物半导体(CMOS)的工艺,使研究人员能够将机器人所需的所有组件“打印”到其本体上,并在单个芯片上一次性构建数百个组件。
每个机器人的宽度约为210至270微米,其所有系统都紧密集成在一起。这些系统包括用于捕获外部LED光并为系统供电的板载光伏电池、处理器、传感器(用于温度测量)和执行器(用于运动控制)。
为了证明这种微型机器人能够感知、思考并自主行动,研究人员对其进行了温度梯度挑战。他们将其放置在一个装满液体的实验容器中,容器一端较冷,另一端较热,并持续照射光源为其光伏电池供电。
试验成功
该机器人被编程为感知温度,如果温度降低,则执行弧形运动以寻找较温暖的流体。如果温度升高,则在原地转向以保持在温暖区域。总共进行了56次试验,机器人成功地自主切换了运动方向。
研究人员指出,这项突破具有诸多优势:“数字编程和板载计算使得单个通用微型机器人能够执行一系列任务,这些任务在制造完成后可以根据需要重新配置。”
研究人员补充说,生产成本并不一定很高,“通过将计算转移到微型机器人上,我们将成本和运营开销都降至最低,从而为广泛应用铺平了道路。”
在这些机器人能够进入人体运行之前,还有很多工作要做。研究人员的下一个目标之一是开发一种完全集成、无线的运动系统,该系统无需依赖外部光源即可移动。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。