横滨国立大学发明掌心大小压电机器人 兼具移动性和亚微米级定位精度

随着科技飞速发展,性能欠佳和技术过时的容身之地已不多。精准定位领域亟需进步,因为许多传统应用中使用的工具远大于被加工物体,导致难以实现高精度定位。此外,高精度定位工具的运动范围也有限。
图片来源: 期刊《先进智能系统》
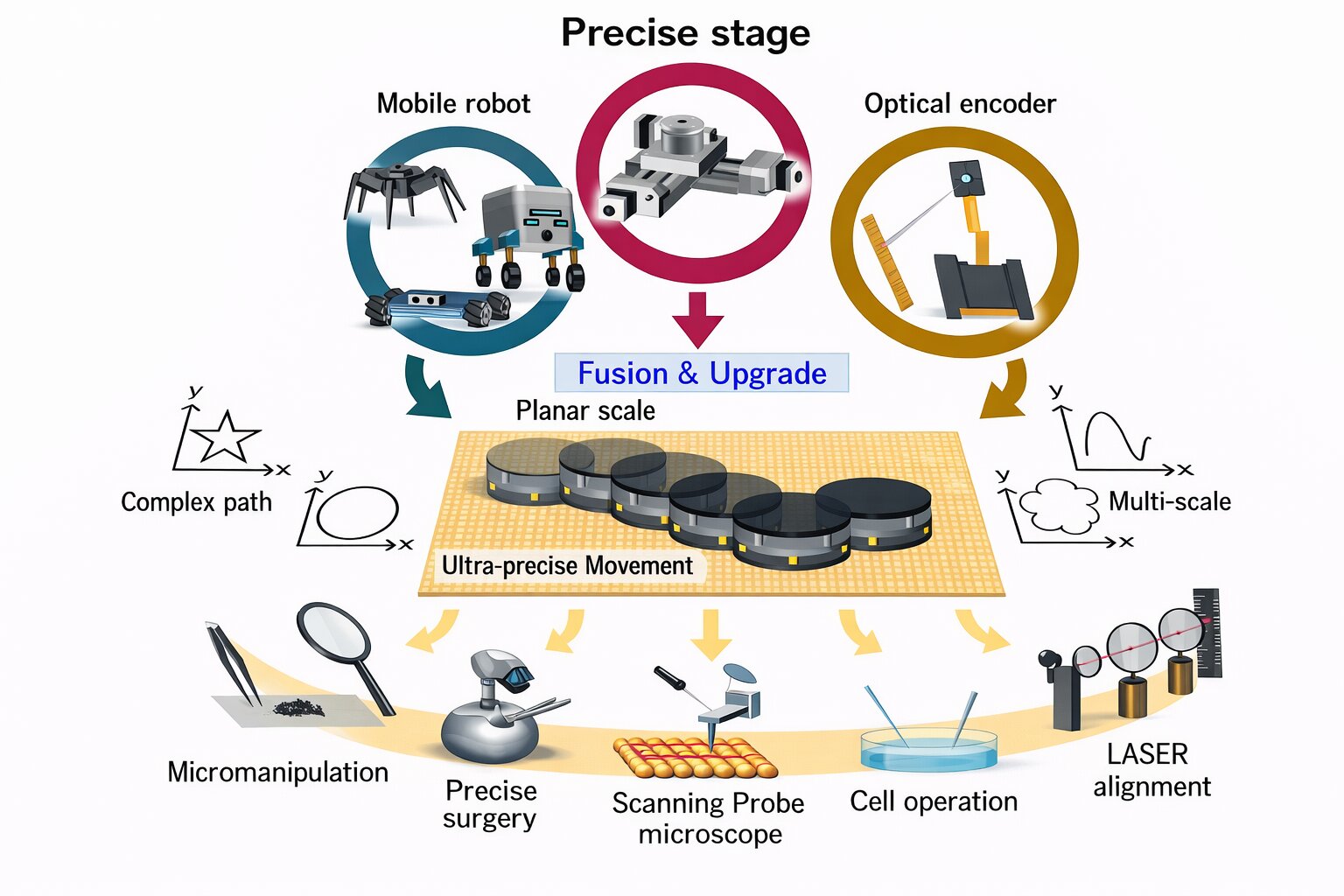
据外媒报道,横滨国立大学(Yokohama National University)成功开发出一款掌心大小的精准定位机器人,该机器人利用压电致动器实现定位目标。相关成果已发表在期刊《先进智能系统》(Advanced Intelligent Systems)上。
传统的精密平台运动范围有限,而移动机器人的定位精度也有限。研究人员设计了一种方法,将这两种传统技术的优势结合起来,利用压电致动器制造出一种兼具两者优点的移动机器人,并将其命名为“全息甲虫”(Holonomic Beetle,简称HB)。
“这项工作为机器人运动控制引入了一种新的范式,通过将一种简单的控制方法应用于具有高分辨率测量功能的压电驱动移动机器人,有助于弥合移动机器人和超精密定位技术之间的性能差距。”横滨国立大学副教授、该研究的研究员Ohmi Fuchiwaki说道。
压电致动器是一种高精度装置,它利用压电效应将电能转化为机械位移。当电场作用于压电材料时,材料内部结构会发生膨胀或收缩,从而产生压电效应。这种结构变化能够延长材料的使用寿命,并提供快速响应、高精度和高分辨率。
“我们在多种尺寸的XYΘ平面上,使用小型高分辨率移动机器人进行了精确的路径跟踪实验。机器人能够沿着所有路径行走,路径误差均小于0.5–4.75 µm。这一结果表明,我们采用PID控制的移动机器人非常适合用于精确定位和远距离运输亚微米级到厘米级的物体。”Fuchiwaki说道。
结果表明,HB在所有尺度下,对于简单和复杂的路径,都能有效抑制路径误差。均方根误差(RMSE)小于1微米。RMSE值越低,表明预测值与实际值之间的误差越小。研究人员相信,随着机器人技术的不断改进,RMSE值未来有望进一步降低。
HB的未来发展前景广阔,未来还有很大的提升空间。研究人员计划提高电机转速,增强机械刚度,加装减振机构,并引入基于模型的控制方法,以进一步抑制随机运动和振动引起的误差。
此外,使HB更易于在不同的工作空间和更实际的操作条件下使用,是实现研究人员最终目标的关键:开发一种移动式、高精度、低成本、可扩展的工具,以替代传统的精密技术,应用于众多领域。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。