地平线研究院:HoloBrain-0全栈开源的VLA基座模型

在具身智能迈向通用化的关键节点,地平线以全栈开源的姿态,交出了一份兼顾技术创新与工程落地的答卷。
2026年3月17日,在第四届具身智能机器人产业发展论坛上,地平线研究院机器人实验室具身操作方向负责人林天威,详细介绍了地平线在具身智能领域的最新突破——全栈开源的VLA(视觉-语言-动作)基座模型HoloBrain-0。
林天威指出,尽管具身智能发展迅速,但在迈向通用化的道路上仍面临模型深度、广度和长度三大挑战。地平线发布的HoloBrain-0,通过创新的“本体感知”架构、高效的数据策略以及全栈开源的生态系统,为解决这些难题提供了全新的思路。该模型不仅在仿真和真实世界任务中取得了业界领先的效果,其轻量化版本更证明了在端侧芯片高效部署的可行性,为推动具身智能技术的普及与应用奠定了坚实基础。

林天威丨地平线研究院机器人实验室 具身操作方向负责人
以下为演讲内容整理:
突破传统VLA,构建本体感知的智能基座
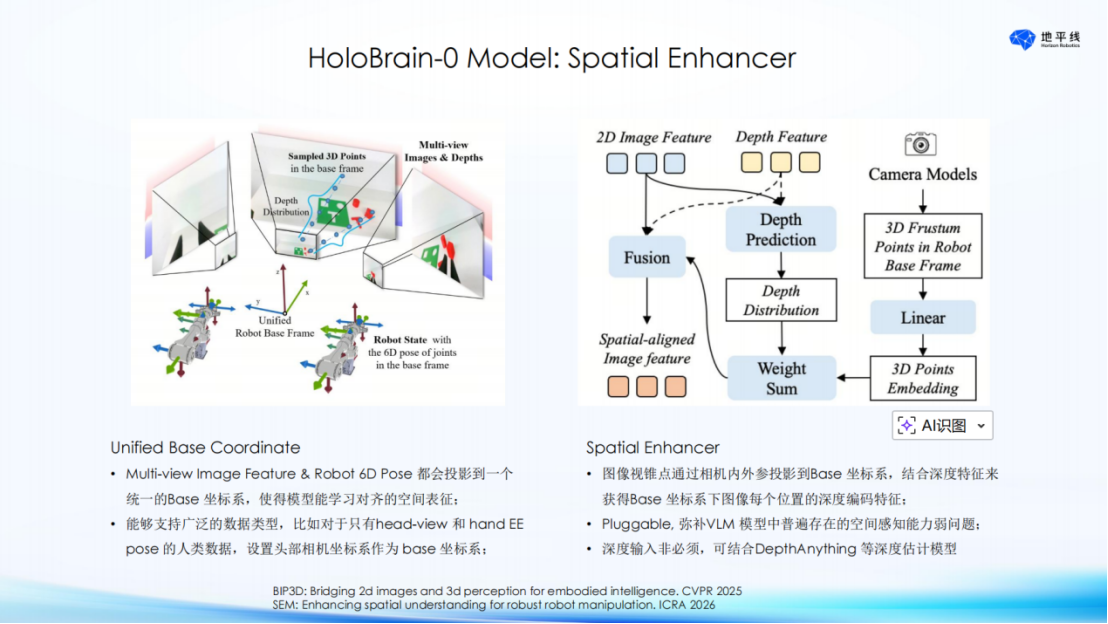
当前主流的VLA模型大多采用从视觉到动作的“黑盒”端到端学习模式,忽略了机器人本体信息这一关键要素,导致模型泛化能力弱,难以适应不同的机器人形态。地平线HoloBrain-0的核心创新在于显式地将本体信息融入模型设计,打造了“本体感知”的VLA。
图源:演讲嘉宾素材
具体而言,HoloBrain-0通过“统一基座坐标系”,将多视角相机的图像特征与机器人的6D位姿统一投影到一个共同的坐标系下,使模型能够学习到对齐的空间表征,从而支持包括人类操作视频在内的更广泛数据类型。同时,模型内置了“空间增强器”,通过相机内外参和深度信息,显著提升了对三维空间的感知能力。在动作输出方面,HoloBrain-0设计了“混合相对动作空间”,同步输出关节的相对转角和末端执行器的相对运动,这不仅增强了模型的空间泛化能力,也使其能原生支持异构多源的数据,如VR遥操作数据。
构建全栈开源生态,加速VLA技术落地
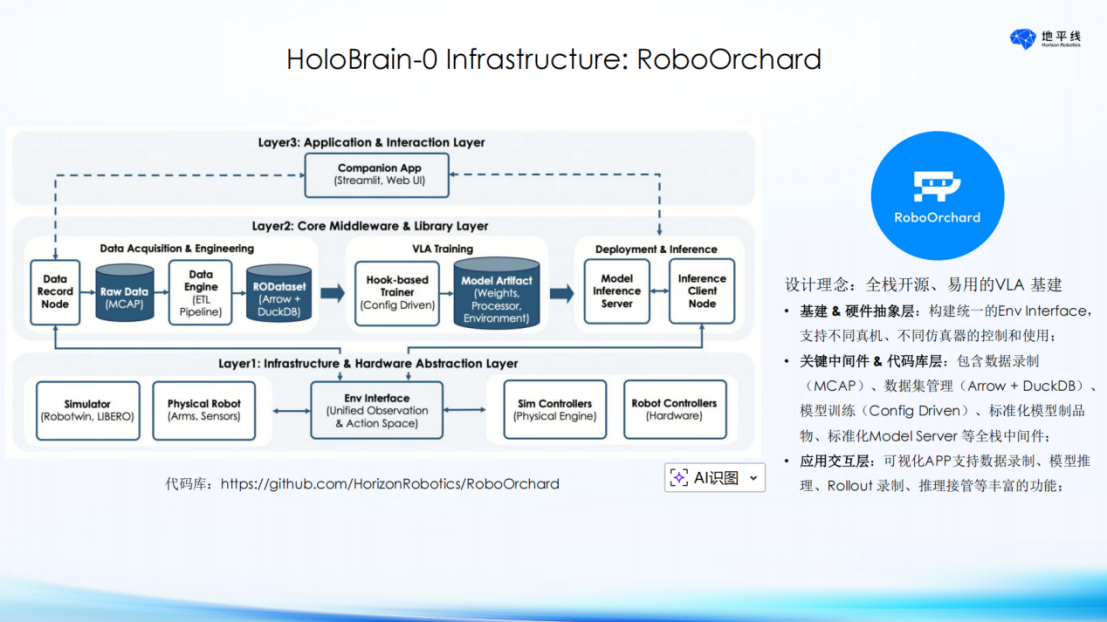
为了解决行业内在数据、训练到部署全流程中的痛点,地平线不仅开源了HoloBrain-0模型本身,更推出了全栈开源的基建框架RoboOrchard,旨在打造一个易用、高效的VLA开发生态系统。
图源:演讲嘉宾素材
RoboOrchard提供了从数据采集、模型训练到最终部署的一站式解决方案。针对行业中标定流程繁琐、数据质量不可控、格式不统一等问题,RoboOrchard推出了一系列特色工具,如提供可视化校验功能的一体化标定工具RoboOrchard Deploy,支持图形化界面操作和实时质量监控的数据采集工具RoboOrchard DataRecorder,以及功能全面的FFmpeg Python封装库RoboOrchard Video,极大地简化了视频处理流程。这些工具共同构建了一个开放、灵活且可复现的VLA研发环境,有效解决了轨迹不连续、推理模式单一等行业难题,真正做到了“授人以渔”。
轻量化模型与创新推理策略,定义高效新范式
图源:演讲嘉宾素材
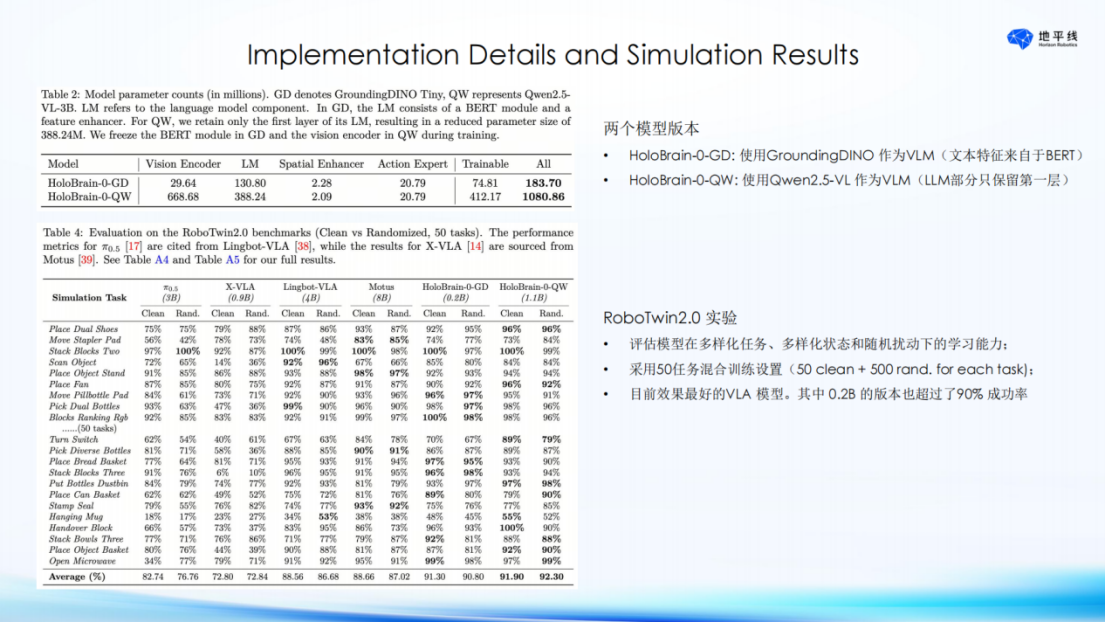
HoloBrain-0提供了两个版本的预训练模型:基于GroundingDINO的0.2B轻量版和基于Qwen2.5-VL的1.1B版。其中,0.2B版本以其极小的参数量,证明了在端侧芯片上高效部署复杂VLA模型的可行性。在仿真RoboTwin2.0基准测试的50项任务中,HoloBrain-0两个版本的平均成功率均超过90%,超越了现有模型。

图源:演讲嘉宾素材
在真实世界的机器人实验中,HoloBrain-0同样表现出色。面对叠毛巾、折纸盒、叠衣服等长程灵巧任务,以及任意物体抓取等通用任务,其表现优于对比模型。特别是在“任意物体抓取”任务中,通过采集多样化的物体数据进行混合训练,模型展现出了对物体几何形状的通用抓取能力,即便面对从未见过的异形或柔性物体,也能保持高成功率。此外,地平线还创新性地提出了SimplerTC异步推理策略,在提升推理效率30%以上的同时,也显著提高了复杂任务的成功率,为机器人的流畅、高效执行提供了新的解决方案。
关于地平线研究院
地平线研究院聚焦具身智能基础算法和框架的研发,推动通用机器人的实现。团队具有Manipulation、Mobility和Real2Sim三个主要研究方向,致力于探索机器人技术的工业化落地。
HoloBrain-0的发布,不仅是地平线在机器人算法研究上的一次重要突破,更是其践行“开放共赢”理念,通过全栈开源,赋能整个行业,与合作伙伴共同探索具身智能无限未来的关键一步。
(以上内容来自地平线研究院机器人实验室 具身操作方向负责人林天威先生于2026年03月17日在第四届具身智能机器人产业发展论坛发表的题为《HoloBrain-0全栈开源的VLA基座模型》的演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。