UNIST开发AI增强型隐形眼镜 通过眼动即可实现机器人控制

据外媒报道,韩国蔚山科学技术院(Ulsan National Institute of Science and Technology,UNIST)的研究团队开发只需眼神即可控制机械臂的隐形眼镜。其原理是在隐形眼镜上印刷微型光学传感器,并利用人工智能(AI)技术放大眼动信号。
该研究团队由机械工程系和人工智能研究生院(Department of Mechanical Engineering and the Graduate School of Artificial Intelligence)的Jeong Im-doo教授领导。相关研究成果发表于国际学术期刊《Advanced Functional Materials》。
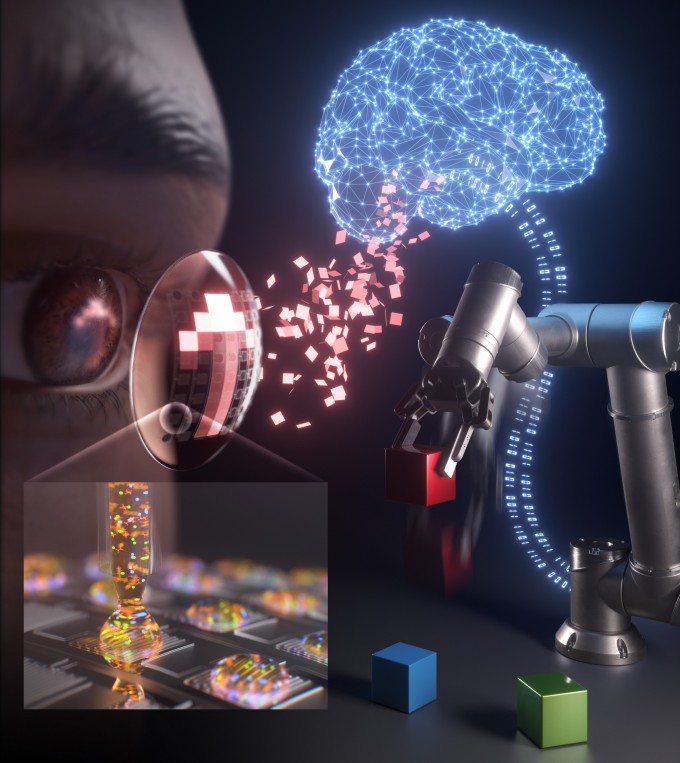
图片来源:UNIST
该研究团队开发了一种名为“弯月面辅助像素打印(Meniscus-Assisted Pixel Printing,MPP)”的技术,可以直接将传感器印刷在隐形眼镜的曲面上。该方法是将喷嘴尖端形成的传感器材料墨滴“印”到隐形眼镜表面。弯月面是指液体的凸面或凹面。由于弯月面的曲面特性,喷墨力与防止墨滴扩散的力之间达到平衡,从而实现所需墨量的精确沉积。
墨滴干燥后,仅留下光敏钙钛矿材料,作为传感器。隐形眼镜上集成100个光电探测器传感器,呈10×10阵列排列。这些传感器读取眼球移动时光线分布的变化,从而追踪视线方向。它可以区分上下左右和对角线方向,并将这些视线信息与机械臂的运动关联起来,甚至可以通过眨眼动作拾取物体。
由于隐形眼镜尺寸小导致信号分辨率低,该问题通过AI技术得以解决。深度学习技术用于放大信号,将信号分辨率提升至相当于6400个传感器的水平。延迟也仅为0.03秒,这意味着信息可以近乎实时地传输到机械臂。
使用眼动模型进行的测试证实,机械臂仅通过瞳孔运动即可完成拾取和移动物体等任务。方向识别准确率高达99.3%。
研究团队解释说:“这项技术结合了硬件工艺创新和基于AI的信号恢复软件技术,克服了隐形眼睛的空间限制。”
Jeong教授表示:“我们已经证明了实现先进的人机交互(Human-Robot Interaction,HRI)系统的可行性,该系统无需单独的控制器即可将人类视觉信息直接转换为机器人控制信号。这项技术具有巨大的应用潜力,例如基于扩展现实(XR)的工业机器人远程控制、灾害环境下的探测机器人操作、国防领域无人系统和无人机的控制,以及医疗和康复支持系统等,只需通过眼动即可精确控制各种电子设备。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。