莱斯大学开发出柔性机械臂 利用光和人工智能驱动精确运动

据外媒报道,莱斯大学(Rice University)研究人员研发出一种柔性机械臂,能够执行绕过障碍物或击球等复杂任务,该机械臂由激光束远程引导和供电,无需任何机载电子设备或线路。这项研究有望为控制植入式手术器械或需要处理精密物体的工业机器提供新的方法。
图片来源: 期刊《Advanced Intelligent Systems》
在一项概念验证研究中,由材料科学家Hanyu Zhu领导的莱斯大学研究团队利用光图案化装置精确地诱导机械臂运动(由偶氮苯液晶弹性体(一种对光有响应的聚合物)制成)。
根据发表在期刊《Advanced Intelligent Systems》的一项研究,新的机器人系统集成了一个经过训练的神经网络,可以预测创建特定手臂动作所需的精确光模式。这使得机器人更容易执行复杂任务,而无需操作员进行同样复杂的输入。
“这是首次演示对软体机械臂的光响应材料进行实时、可重构、自动化控制,”莱斯大学博士校友、该研究的第一作者Elizabeth Blackert说道。
传统机器人通常采用刚性结构,并配备铰链、轮子或夹爪等可移动元件,以实现预定的、相对受限的运动范围。软体机器人在医学等领域开辟了新的应用领域,这些领域需要与精密物体进行安全交互。所谓的连续体机器人是一种摆脱移动限制的软体机器人,能够实现自适应运动,并大幅提升自由度。
材料科学与纳米工程助理教授Zhu教授表示:“使用软材料制造机器人面临的一个主要挑战是,它们要么被束缚,要么功能非常简单、预先设定好。构建远程且可任意编程的软体机器人需要独特的专业知识组合,包括材料开发、光学系统设计和机器学习能力。我们的研究团队非常适合承担这项跨学科工作。”
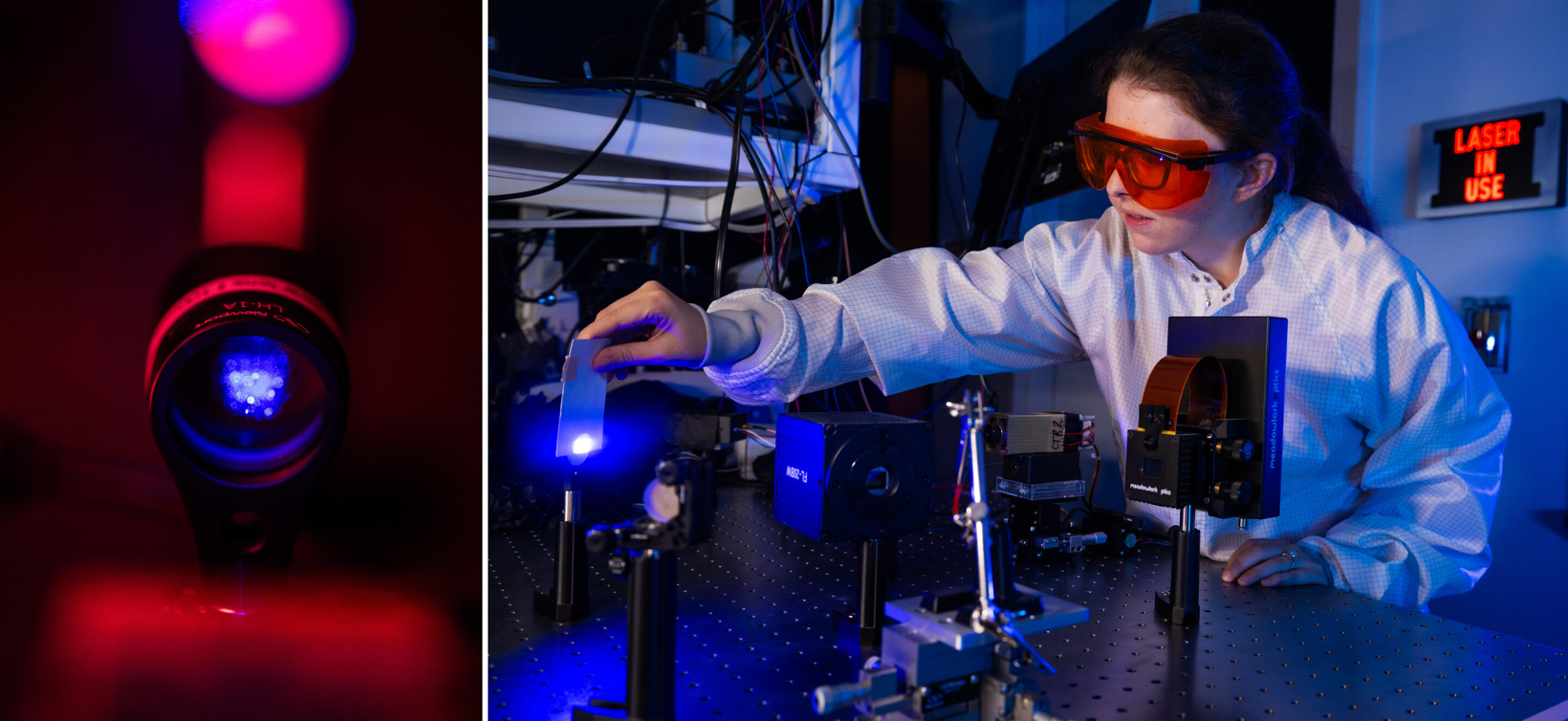
该团队创造了一种新型弹性体,它在蓝色激光照射下会收缩,然后在黑暗中松弛并重新生长——这一特性被称为“快速松弛时间”,使实时控制成为可能。与其他需要有害紫外线照射或需要几分钟才能复位的光敏材料不同,这种材料使用更安全、更长的波长,并在几秒钟内做出响应。“当我们用激光照射材料的一侧时,收缩会导致材料向该方向弯曲,”Blackert表示。“我们的材料会像花茎向阳光弯曲一样向激光弯曲。”
为了控制这种材料,研究人员使用空间光调制器将单束激光分成多个子光束,每个子光束指向机械臂的不同部位。这些子光束可以打开或关闭,并调整强度,使机械臂可以在任何给定点弯曲或收缩,就像章鱼的触手一样。原则上,这项技术可以创造出一个几乎拥有无限自由度的机器人——远远超出了传统固定关节机器人的能力。“这项技术的创新之处在于利用光模式来实现复杂的形状变化,”化学与生物分子工程系教授兼副系主任、材料科学与纳米工程系教授Rafael Verduzco说道。“在之前的工作中,材料本身被设计成某种图案或程序,以某种方式改变形状,但在这里,材料可以根据激光子光束的模式以多种方式改变形状。”
为了训练这种多参数机械臂,团队运行了少量的光照设置组合,并记录了机械臂在每种情况下的变形情况,并利用这些数据训练卷积神经网络——一种用于图像识别的人工智能。之后,该模型能够输出所需的精确光照模式,以创建所需的形状,例如弯曲或伸展运动。
目前的原型是扁平的,可在二维空间内移动,但未来的版本可以通过增加传感器和摄像头来实现三维弯曲。
“这是朝着更安全、更强大的机器人迈出的一步,这些机器人可用于各种应用,从植入式生物医学设备到处理软质商品的工业机器人。”Blackert说道。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。