中科院开发手指形触觉传感器 推进机器人触摸技术的发展

日益精密的传感器的发展可以促进各种技术的进步,包括机器人、安全系统、虚拟现实(VR)设备和精密假肢。其中,多模态触觉传感器可以采集不同类型的触觉相关信息(例如压力、纹理和材料类型),是最有希望从人工复制人类触觉中获益的应用之一。
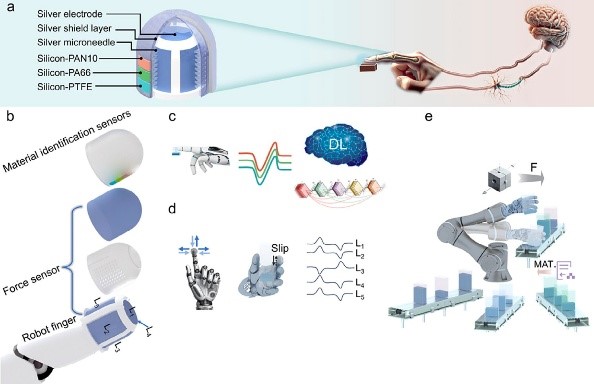
图片来源:《Advanced Materials》
尽管电子工程师在过去几十年中创造了各种高灵敏度的触觉传感器,但迄今为止,准确检测施加力的方向和大小仍是一项重大挑战。此外,许多现有的传感器无法正确识别物体或表面所用的材料。
据外媒报道,中国科学院(Chinese Academy of Sciences)的研究人员最近开发出一种受人类指尖启发的新型多模态触觉传感器。研究人员在期刊《Advanced Materials》上发表的论文中介绍了这种传感器,它可以检测力的方向,同时还能准确识别现实世界中常见的12种材料。
研究人员在论文中写道:“多模态触觉感知对于推进人机交互至关重要,但实时多维力检测和材料识别仍然具有挑战性。在此,我们提出了一种基于摩擦电效应的手指形触觉传感器(FTS),能够进行多向力传感和材料识别。”
这种新型传感器的形状像人的指尖,由两个主要的互补结构组成。第一部分是外部结构,用于识别材料;第二部分是内部结构,用于感应力及其方向。
研究人员写道:“3种材料被嵌入指套硅胶外壳的表面,形成用于材料识别的单电极传感器。在力感应部分,硅胶外壳的外表面涂有导电银浆作为屏蔽层。内壁有4个硅胶微针阵列和1个硅胶凸起,而内部聚乳酸骨架上则涂覆有5个银电极。这些组件通过指甲附近的互锁结构连接,实现了硅胶外壳和骨架之间的局部接触和分离,从而能够通过5个电极的信号实现力方向检测。”
研究人员在一系列初步模拟和实际实验中评估了手指形触觉传感器。他们发现,该传感器在施加不同的力时表现良好,同时还能以极高的准确度识别不同的材料。
作为现实世界实验的一部分,研究人员还将该传感器与机械手集成在一起,使用数据分析平台LabVIEW和Jupyter根据传感器采集的数据识别材料。他们的发现非常有希望,表明该传感器可用于增强机器人系统的触觉能力。
研究人员写道:“外部传感器识别12种材料的准确率达到了98.33%。此外,将FTS集成到机器人手掌中,可以在智能分拣环境中实现实时材料识别和力检测。这项研究在智能机器人触觉感知方面具有巨大的应用潜力。”
该研究团队最近的研究成果可能有助于人形机器人、智能假肢和其他技术的未来发展,这些技术都可以从收集触摸相关数据中受益。未来,该团队的传感器还可以进一步改进;例如支持识别更广泛的材料和检测更多类型的触觉信息。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。