
浦项科技大学开发出新型触觉设备 提升工业场景远程机器人操控安全性

据外媒报道,韩国浦项科技大学(POSTECH)的研究团队开发出新型触觉设备,旨在提升工业场景作业人员的安全性与工作效率。这项研究近期发表于期刊《IEEE Transactions on Industrial Informatics》,由浦项科技大学机械工程系Keehoon Kim教授与博士生Jaehyun Park主导。
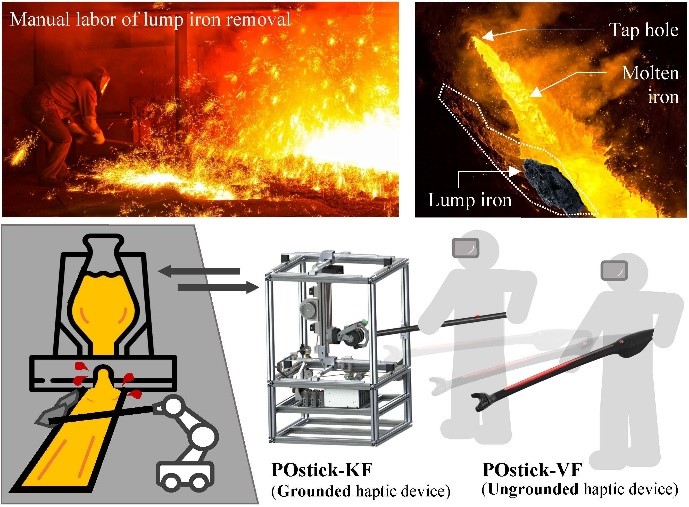
图片来源:POSTECH
在工厂、炼钢厂等高危工业环境中,机器人自动化技术正快速发展。然而,即便机器人技术不断进步,仍存在许多需要人工介入的作业环节。挑战在于:机器人操作可能比预期更加复杂,即使是微小的失误也可能导致事故。
为了解决这个问题,该研究团队开发了两种触觉设备,使用户在远程操控机器人的同时,也能感受到指尖的互动。POstick-KF(动觉反馈)设备能将机器人推拉物体时感受到的精确力变化直接传递给操作者,从而实现精细准确的操控;而POstick-VF(视觉-触觉反馈)设备则结合了触觉与视觉的复合反馈,更适合大范围作业场景。这两种设备均按真实工具的实际尺寸和形状设计,即使新手也能快速适应,并可根据作业环境或操作者的技能水平灵活选用。
研究人员进行的仿真实验验证了这些装备的有效性:与传统的触觉设备相比,用户的操作精度显著提升且碰撞障碍物概率大幅降低。值得注意的是,随着时间的推移,POstick-VF的用户熟练程度有了明显提高,突出了其培训优势。
该系统还集成了数字孪生技术,支持用户在虚拟环境中模拟真实机器人操作,并结合增强现实(AR)技术进一步提升用户的操作沉浸感与专注度。
主导这项研究的Kim教授表示:“我们的技术使人机协作时,需要人类精细操作的任务能更安全精准地完成。我们期待该成果能提升工业现场安全性,减轻作业人员负担。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





