研究人员开发新型机器人系统 利用AI赋能机器人技术

人工智能(AI)的发展开启了自动化机器人适应环境的新纪元。尽管机器人技术在过去几十年取得了显著进步,但仍面临限制其潜力发挥的挑战。传统机器人通常依赖预设指令和固定配置,难以应对突发状况。而具备认知、分析、推理和决策能力的AI技术,使机器人能够智能化运作,显著提升了辅助人类的能力。
图片来源:PolyU-Nanjing Technology and Innovation Research Institute
据外媒报道,借助人工智能(AI)的应用,香港理工大学(Hong Kong Polytechnic University,PolyU)机械工程系智能机器人与自动化讲座教授、香港理工大学南京技术创新研究院(PolyU-Nanjing Technology and Innovation Research Institute)院长张丹教授领导的研究团队研发出多个具有高动态性能的新型机器人系统。
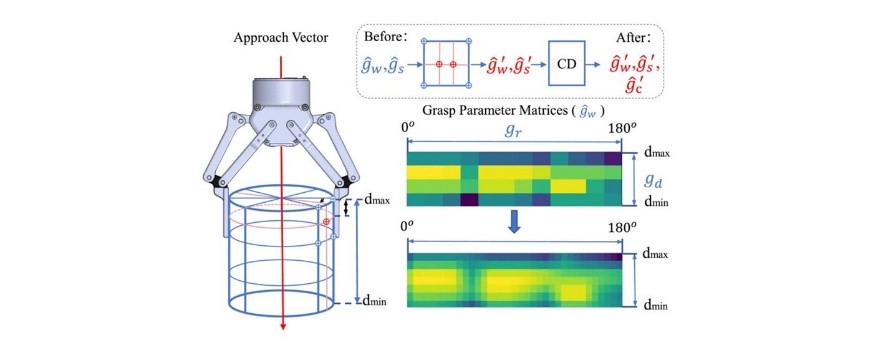
张教授团队近期提出了一种抓取姿态检测框架,利用深度神经网络生成丰富的全向(六自由度,“6-DoF”)高精度抓取姿态。为识别待抓取物体,研究采用卷积神经网络(CNN)分析多尺度圆柱体模型,获取物体位置和尺寸的详细几何信息。多个多层感知器(MLP)可优化机械臂的精度参数,包括夹持器宽度、特定平面旋转角度和夹持深度下的抓取评分,以及碰撞检测。这些参数被输入到框架内的算法中,将预设配置扩展为适应场景的全面抓取姿态。
实验表明,该方法在实验室模拟中始终优于基准方法,实际测试中平均成功率达84.46%,较基准方法的78.31%有明显提升。
张教授团队的研究表明,AI技术,尤其是深度学习,显著提升了机器人感知和理解环境的能力。这一进步为处理标准设定之外的任务提供了更高效灵活的解决方案。AI与机器人技术的融合不仅提高了精确度,还赋予了机器人自动化实时决策和持续学习的新能力,使机器人性能随时间推移不断优化,为未来社会拓展机器人应用领域奠定了基础。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。