辅助驾驶域控核心方法论是什么-下|盖世大学堂辅助驾驶域控系列知识讲解

一、三种开发范式与汽车文化的本质
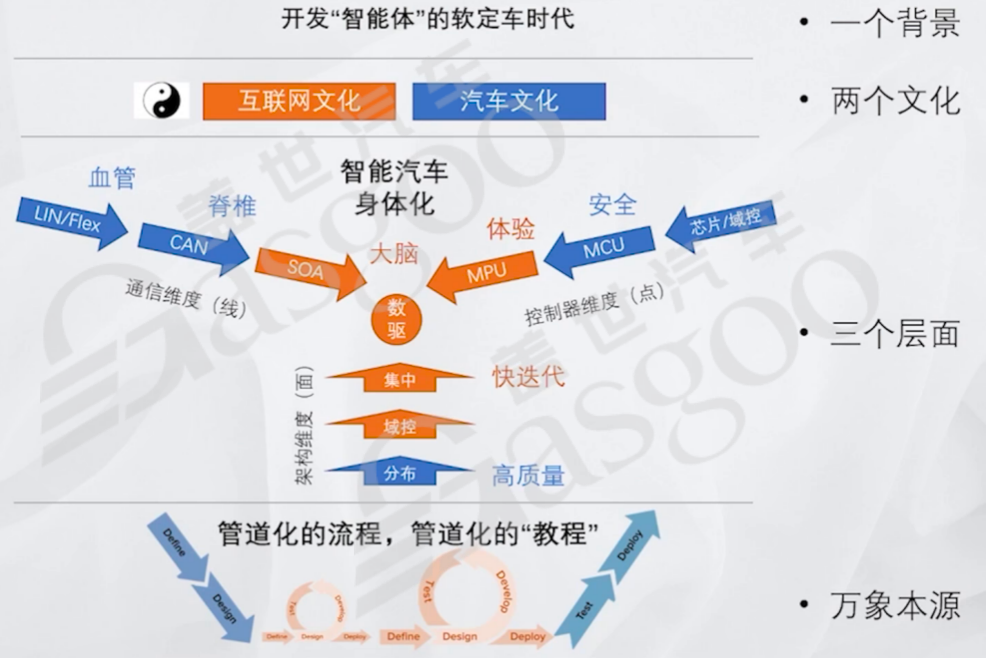
在智能汽车技术演进的过程中,存在着三种核心开发范式,这些范式不仅体现了技术的迭代,更折射出不同阶段的行业逻辑。理解这些底层逻辑,对于把握智能汽车的发展方向至关重要。
汽车文化的核心可总结为“固定 稳定”。这里的“固定”指的是系统的核心矩阵保持不变,这种固定性带来的直接优势便是稳定性。稳定性在软件层面是一个深层次的工程化问题,它涉及到迭代过程中功能增减对系统的影响,包括CPU负载波动、GPU负载波动等时间维度的波动,这些都是工程实践中需要严格控制的要素。
传统汽车的研发模式中,输入与输出信号相对固定,例如电动车窗的控制逻辑,输入信号和输出结果都是可预期的。这种模式下,质量控制更多依赖流程的严谨性,因为输入稳定、设计固定,预期结果明确,因此更容易实现高质量交付。然而,当技术演进到辅助驾驶和智能座舱领域时,情况发生了根本变化。外部环境的不确定性使得系统必须面对动态输入,这对稳定性提出了全新挑战。例如,当系统遭遇32个锥桶时可能出现卡顿,这种问题在传统固定输入模式中不会出现,却成为辅助驾驶时代必须解决的工程难题。
当前行业正处于第二种范式——“可变 不稳定”。随着SOA的应用和FOTA技术的普及,软件开始具备可变性。SOA架构下,控制器之间的通讯链路更加灵活,支持动态订阅关系,理论上能实现“千人千面”的功能定制,例如智能座舱的吸烟模式、迎宾模式等场景化服务。但这种灵活性的代价是系统稳定性的下降。当多个控制器无序订阅信号时,可能导致服务器内存占用激增,甚至引发软件崩溃。即便通过版本基线和集成控制进行约束,服务组合的测试复杂度仍会大幅上升,最终导致迭代效率并未如预期般提升。这种“看似可变却需固化”的矛盾,正是当前行业面临的尴尬处境。
未来的第三种范式将是“可变 稳定”,这一阶段的核心是实现无人化的系统逻辑。以GPU为代表的模型化思维,能够在处理动态输入时保持算力负载的稳定。这意味着工程团队无需在每次迭代时重新设计负载均衡,从而显著提升迭代效率。例如,端到端模型在处理不同数量的障碍物时,其运算负载波动远小于传统规则算法,这种稳定性为快速迭代奠定了基础。这种范式的本质是通过模型算法替代规则算法,减少因逻辑调整导致的负载波动,最终实现“变化中保持稳定”的工程目标。
二、通信架构的演进逻辑
通信方式的演变与开发范式的迭代相辅相成,可分为三个阶段:基于信号的通信(CAN总线)、基于服务的通信(以太网)和基于数据的通信(内存级交互)。
CAN总线作为传统汽车的主流通信方式,其核心优势在于“有限资源下的可控性”。在设计中期固化后,CAN总线的负载特性相对稳定,调试难度较低,适合处理固定信号的传输(如车窗控制、灯光调节等)。但这种稳定性依赖于固定的拓扑结构,当面对辅助驾驶所需的海量动态数据(如激光雷达点云、摄像头图像)时,其带宽瓶颈和实时性不足的问题逐渐凸显。
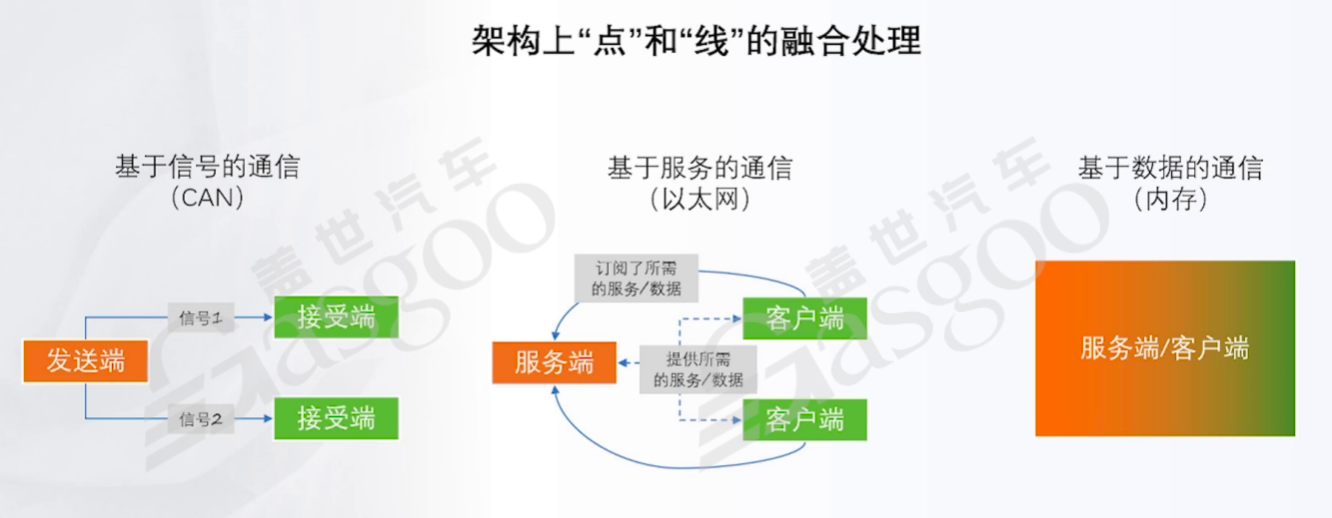
基于服务的通信(SOA架构)通过以太网实现,理论上支持灵活的服务订阅关系,能够满足智能座舱和辅助驾驶的动态需求。例如,不同车辆可根据用户习惯订阅不同服务,实现个性化功能。然而,这种灵活性带来了新的工程挑战:当多个控制器无序订阅服务时,会导致通信负载剧烈波动。某案例显示,额外三个控制器的非规划订阅导致服务器内存占用激增4倍,最终引发软件崩溃。因此,即便SOA架构支持动态交互,实际工程中仍需通过版本基线和集成测试进行约束,这在一定程度上抵消了其灵活性优势。
基于数据的通信代表未来趋势,其核心是通过内存级交互和云端协同实现“灵活设计下的可控性”。在这种模式下,系统不再依赖固定的服务接口,而是通过数据相关性分析自主生成决策逻辑。例如,智能座舱可记录用户在沮丧情绪下的操作行为,如停留车内、播放特定歌曲,通过本地模型训练,在第五次检测到相同情绪时自动触发服务,整个过程无需云端干预,实现“车端闭环”的个性化体验。这种通信方式将不可控性转移至可扩展的云端,通过全局优化实现车端的稳定性。
通信架构的演进还体现在“去人为干预”的趋势上。以共享出行为例,早期共享单车通过补贴机制调节供需,但人为因素导致的波动始终存在。而L4级辅助驾驶通过去除司机这一变量,实现了全局路径优化,显著提升了系统稳定性。这一逻辑同样适用于汽车内部通信:当系统依赖人为定义的服务接口时,必然存在协调成本和波动风险;而模型化的通信方式能够通过算法自主优化,减少人为干预带来的不确定性。
三、整车架构的变革路径
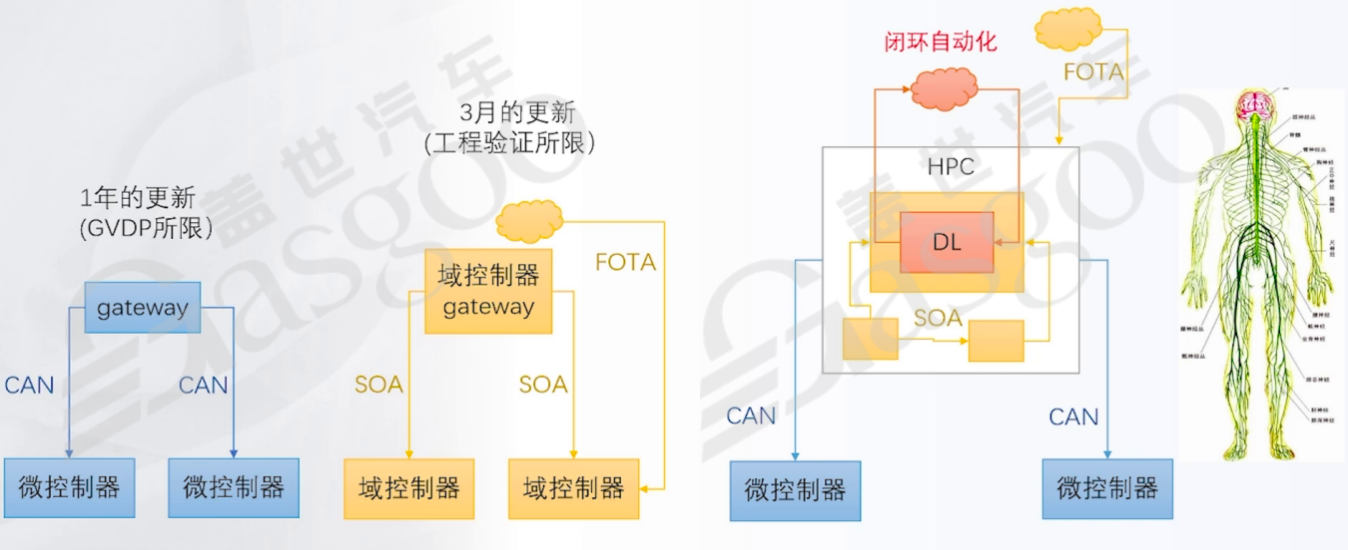
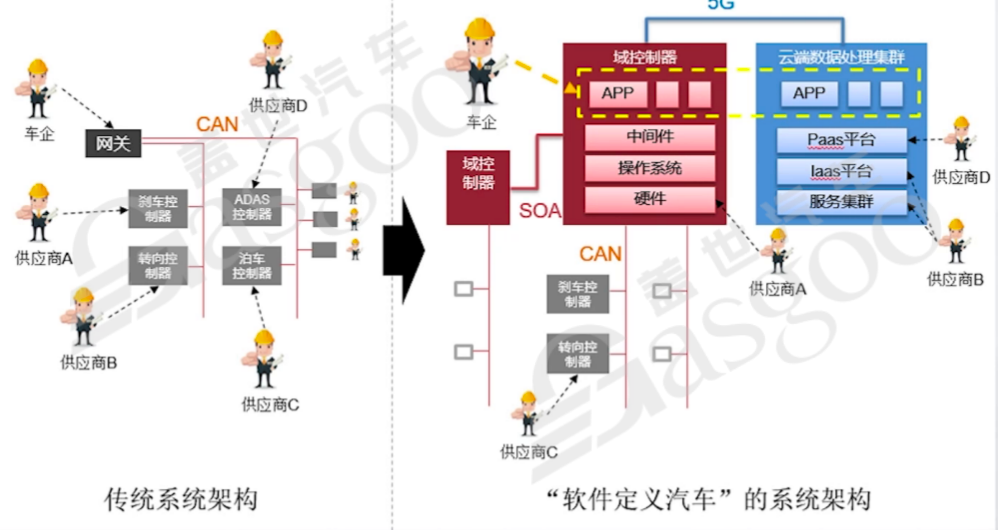
整车架构的演变呈现“身体化”特征,即从分布式ECU向集中式域控制器演进,最终实现类似人体神经系统的协同逻辑。
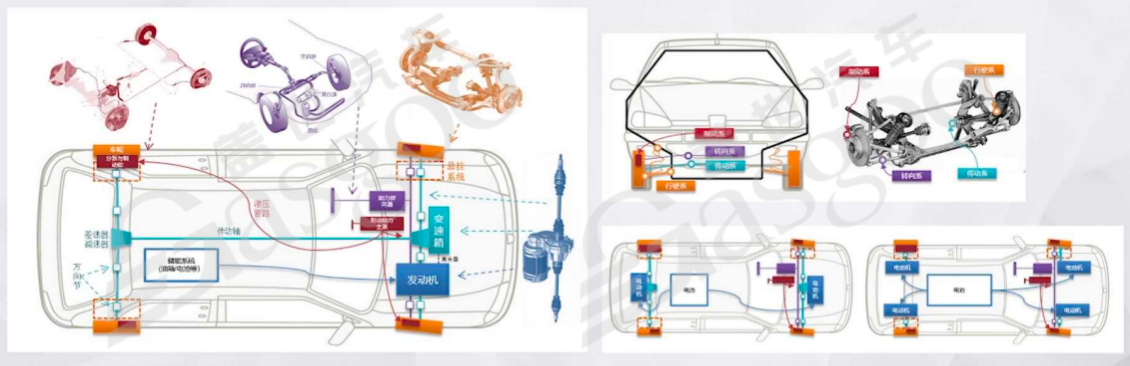
硬件层面的简化是架构变革的基础。传统燃油车的复杂性体现在机械结构的冗余,而电动车通过多电机布局消除了这些部件,不仅降低了机械复杂度,还为辅助驾驶提供了更线性的控制特性。特斯拉将线束长度从3公里缩减至100米的案例,正是硬件集成化的典型成果——通过减少物理连接点,提升系统可靠性并降低重量。
平台化与模块化是平衡成本与灵活性的关键。特斯拉通过高零部件复用率降低制造成本,即便牺牲部分外观精致度也坚持标准化设计。这种策略使得其车型开发周期较传统车企缩短30%以上。同时,平台化设计允许在统一架构下调整车身尺寸,通过“零部件簇”的概念实现性能区间的灵活匹配,例如动力电池模组的通用接口支持不同容量电池的快速替换。
自动化制造的核心价值并非降本,而是提升一致性与迭代速度。传统焊接车间依赖人工操作,虽然短期成本较低,但产能爬坡周期长。机器人的引入虽然增加了初期投入,却能通过刚性化设计实现一致性控制,例如特斯拉为适配机械臂装配,将柔性部件改为刚性结构,虽增加成本但显著提升了产能稳定性。这种“以成本换一致性”的逻辑,本质是通过机器替代人,消除人际协作的不确定性。
域控制器架构的集中化是一把双刃剑。集中式架构有利于软件的整体调整,例如通过中央计算平台统一处理感知数据,提升决策效率;但同时对工程师提出了更高要求,需要跨领域知识。例如,域控制器内部的总线通讯逐渐采用PCIe或SBI等通用协议,而视频传输则依赖LVDS或FPD-Link等专用技术,这种混合架构要求工程师同时掌握软件与硬件知识。

值得注意的是,集中化与分布式并非绝对对立,而是螺旋式迭代的关系。消费电子领域已出现“云边协同”的趋势——终端设备仅保留输入输出功能,核心计算依赖云端集群。这种模式若延伸至汽车行业,可能催生“轻量化车端 云端计算”的架构,但其可行性仍需验证。历史规律表明,过度集中化可能引发灵活性缺失,而适度分布式则能保留冗余度,因此未来架构更可能是“集中管控下的分布式执行”。
四、软件架构与安全体系的重构
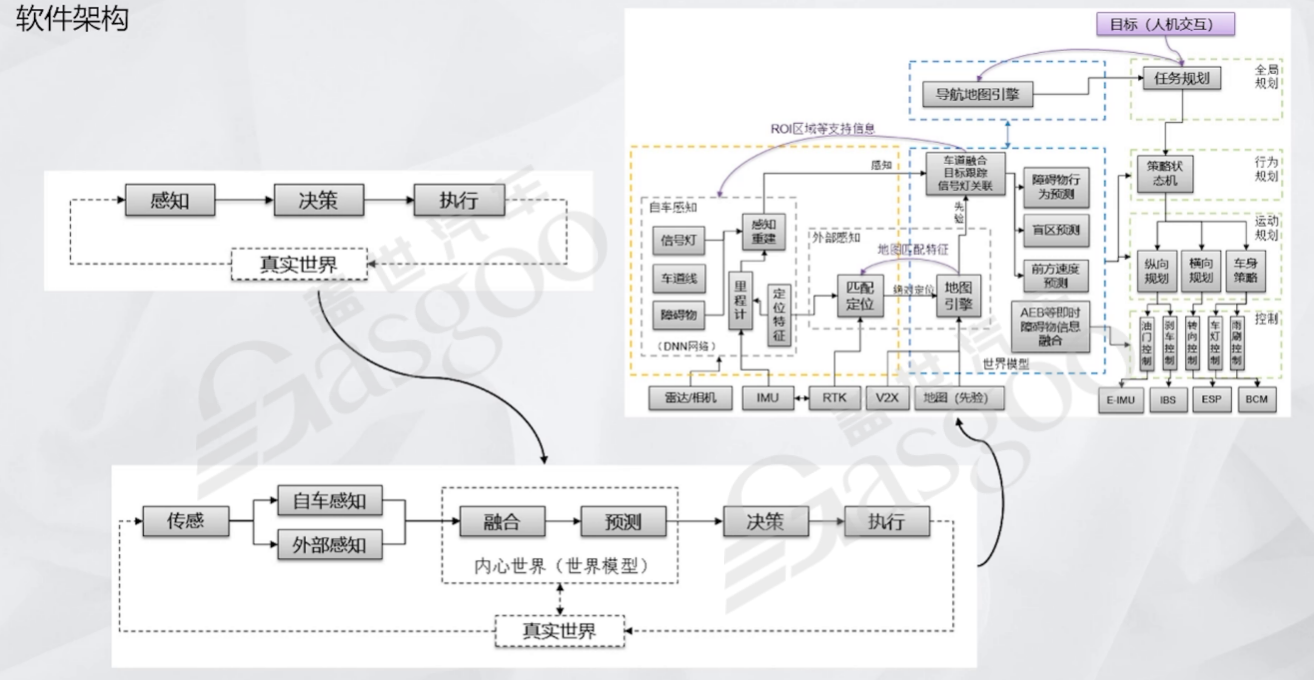
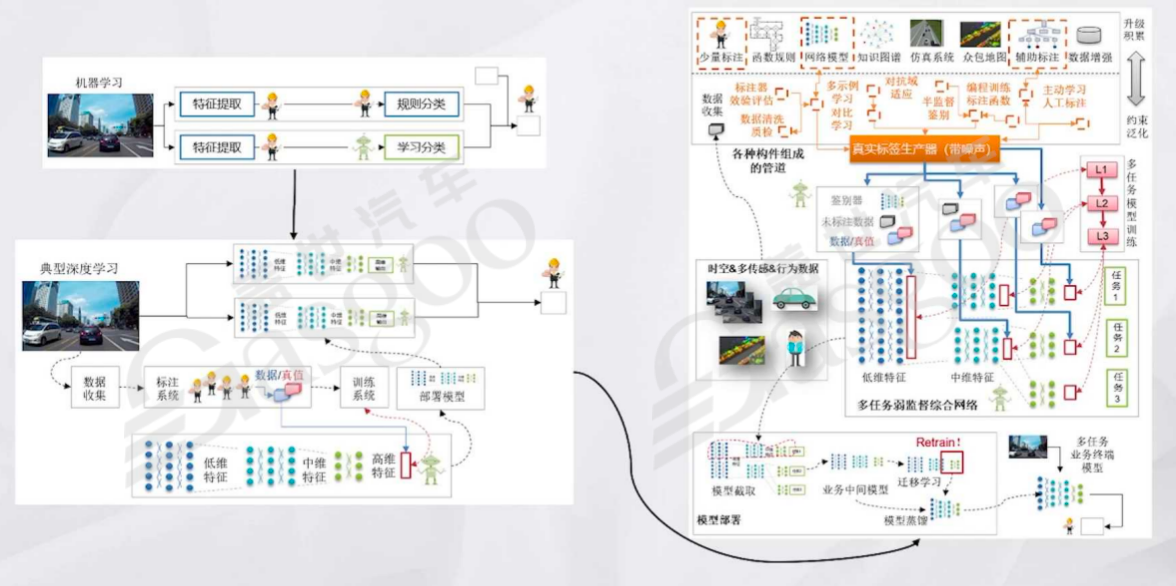
辅助驾驶软件架构的演进,本质是从“规则驱动”向“数据驱动”的转型,其核心模块包括感知、决策、执行,但其内在逻辑已发生根本变化。
传统架构采用分层设计,感知层处理传感器数据,融合层构建世界模型,决策层进行路径规划,执行层控制车辆运动。这种模式依赖人工定义的规则,但面对复杂场景时,规则的组合爆炸会导致系统脆弱性。例如,某重卡因32个锥桶引发融合层算力非线性增长,最终导致系统死机,这正是规则算法在动态场景下的典型缺陷。
当前行业处于“混合架构”阶段,即规则算法与模型算法并存。例如,感知层采用深度学习模型识别障碍物,决策层仍保留部分规则(如交通信号灯的逻辑判断)。这种过渡形态既能利用模型的泛化能力,又能通过规则保证关键场景的安全性。但混合架构的挑战在于两者的协同:模型输出的不确定性需要规则进行约束,而规则的刚性又可能限制模型的灵活性,这种矛盾需要通过大量测试案例进行平衡。
未来的端到端模型将打破分层界限,通过数据直接学习输入与输出的映射关系。例如,特斯拉的世界模型通过压缩海量视频数据,学习物理规律并预测车辆运动轨迹,无需人工定义“障碍物避让”的中间规则。这种架构的优势在于:其一,减少因分层交互导致的信息损失;其二,通过模型压缩实现低能耗运算;其三,动态场景下的负载稳定性更强。但端到端模型的落地需解决可解释性问题——当系统做出决策时,工程师难以追溯具体逻辑,这对功能安全提出了全新要求。
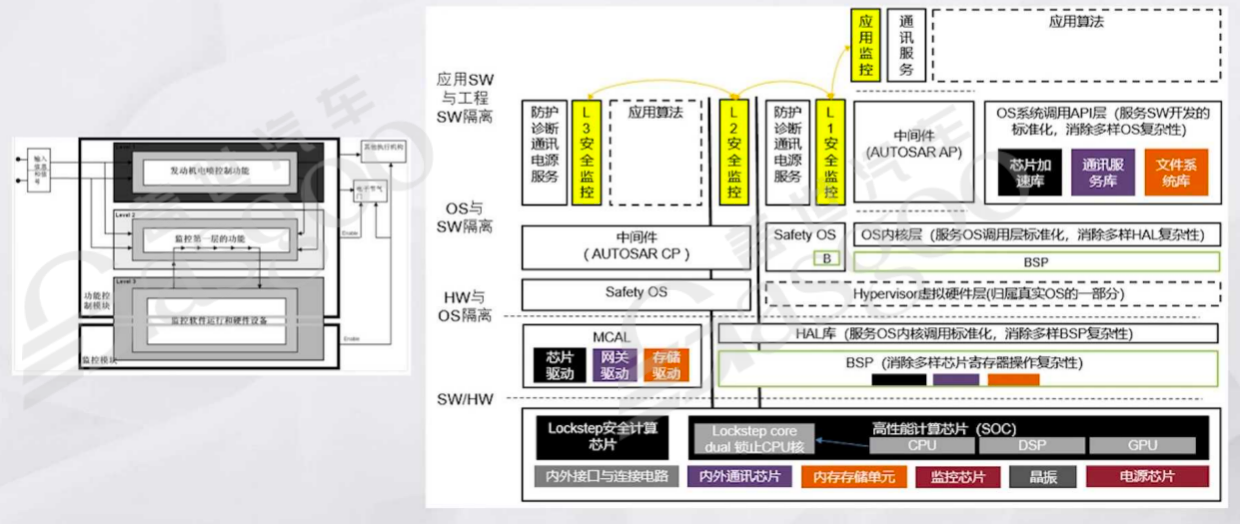
安全体系的构建也随架构变革而升级。传统汽车采用“层层校验”机制(如e-gas架构的三层检查:业务层、芯片内检查层、外部芯片监控层),通过硬件冗余和逻辑隔离实现高安全性。而辅助驾驶时代,安全体系转向“交错监控”:在域控制器内部,不同核运行不同操作系统和中间件,通过L1-L3级监控实现功能安全。例如,高性能计算芯片中的“安全岛”可监控主核的运算状态,这种设计牺牲了部分效率,但确保了系统的容错能力。
这种安全逻辑与互联网思维形成鲜明对比:汽车行业通过“刻意制造分歧”(如多核异构、多供应商组件)提升安全性,而互联网追求“上下一心”的效率最大化。这种差异源于行业属性——汽车安全关乎生命,而互联网更注重用户体验。因此,在MCU等安全关键部件上,汽车思维仍占主导;在MPU等性能导向的芯片上,互联网的灵活迭代逻辑逐渐渗透。
五、研发流程与供应链的重构
软件定义汽车的趋势,正在重塑研发流程与供应链关系,其核心是实现“持续交付”与“生态协同”。
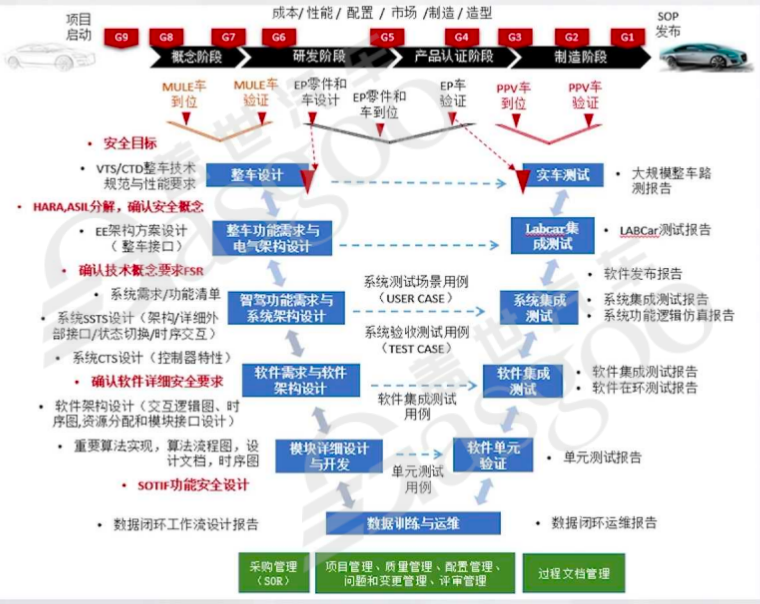
传统汽车研发遵循V模型流程:需求分析、系统设计、硬件开发、软件编码、测试验证,每个阶段严格串行,周期长达数年。这种模式适合硬件主导的时代,但难以适应软件的快速迭代。例如,某车型因软件BUG需要召回时,传统流程需重新走一遍验证环节,耗时数月;而智能汽车通过OTA技术,可在数天内完成补丁推送,这背后是研发流程的根本性变革。
当前行业已转向“敏捷开发 V模型”的混合模式。敏捷开发通过迭代实现软件快速迭代,例如特斯拉的模型训练周期已缩短至3-7天;而V模型的严谨性则确保硬件与软件的兼容性。这种结合体现在:其一,需求管理条目化,支持快速变更;其二,CI/CD自动化,夜间台架测试替代人工操作;其三,OTA分阶段推送,平衡用户体验与安全性。
研发工具链的自动化是效率提升的关键。例如,代码生成环节通过大模型将需求直接转换为代码,测试环节通过虚拟仿真覆盖海量场景,部署环节通过云端平台实现一键推送。某厂商的数据显示,自动化链路将测试周期从3天缩短至8小时,研发效率提升近90%。但工具链的整合面临挑战:汽车行业的传统工具与互联网工具存在兼容性问题,需要通过中间件实现协同。
供应链的变革同样深刻。传统模式下,Tier1供应总成、Tier2供应零部件,OEM进行集成,这种层级关系导致协同效率低下。例如,某功能需要修改传感器参数时,OEM需协调Tier1,Tier1再对接Tier2,响应周期长达数月。而“平台 生态”模式打破了这种壁垒:OEM主导平台定义,通过资本合作深度绑定芯片、软件供应商,实现需求的快速传导。例如,某车企通过控股芯片公司,将传感器参数调整周期从3个月压缩至2周。
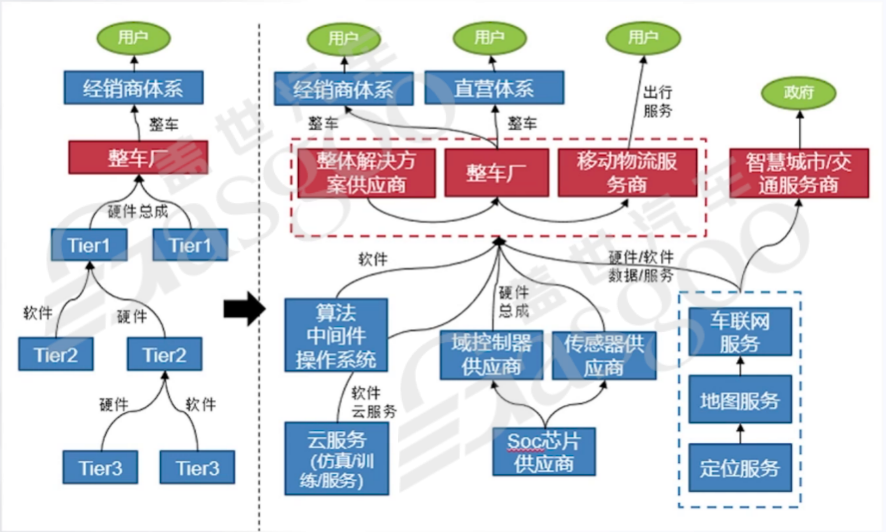
这种变革的核心是“价值分配”的重构:传统供应链按零部件成本定价,而新生态按软件价值分成。例如,地图服务商不再按授权费收费,而是按用户活跃度分成;算法供应商通过OTA持续优化功能,获取长期收益。这种模式推动供应链从“买卖关系”转向“共生关系”,但也带来新的挑战:生态伙伴的利益平衡、数据安全的边界划分、知识产权的归属界定等,这些问题需要通过标准化和契约设计逐步解决。

六、智能汽车的本质与挑战
智能汽车的变革远超“交通工具”的范畴,其本质是“类人智慧”在机械载体上的实现,这一过程涉及技术、流程、生态的全方位重构。
从技术层面看,50%的核心Know-how来自汽车行业之外。因此,从业者需打破行业边界,用“机器人视角”思考问题——例如,模型如何感知环境、如何学习用户习惯,而非仅关注机械结构的优化。这种思维转变是理解“软件定义汽车”的前提。
从工程层面看,架构的核心是“在变化中保持稳定”。无论是域控制器的集中化、通信方式的内存级交互,还是模型算法的广泛应用,其最终目标都是实现“可变 稳定”的工程状态。这要求团队在灵活性与安全性之间找到平衡:过度追求稳定会牺牲创新,而盲目拥抱变化则可能导致系统失控。
从行业层面看,最大的挑战在于“人的转变”。工程师需要从“专精”转向“通才”,既懂汽车的安全逻辑,又理解互联网的迭代思维;团队需要从“层级管理”转向“生态协同”,打破部门壁垒;行业需要从“机械产品”转向“科技服务”,重构价值分配体系。这种转变的难度远超技术本身,却是智能汽车时代的必然要求。
未来的竞争,将是“体系能力”的竞争——谁能更快实现模型迭代、更稳保障系统安全、更好协同生态伙伴,谁就能在智能汽车的赛道上占据先机。而这一切的基础,正是对“第一性原理”的深刻理解:透过技术现象,把握“灵活与稳定”“集中与分布”“规则与数据”的本质矛盾,方能在变革中找准方向。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。