武汉大学:车路云一体化动态认知地图构建关键技术研究

当前,我国依托跨行业协同机制、基础设施建设及信息通信技术优势,通过"车路云一体化"推动辅助驾驶技术发展。截至2025年,全国累计开放测试道路超22,000公里,发放测试牌照5,200余张,道路测试总里程达8,800万公里。政策层面,2018年工信部推动《车联网(智能网联汽车)产业发展行动计划》,2021年住建部与工信部联合开展"双智"城市试点,2024年五部委启动"车路云一体化"应用试点,标志着技术验证进入商业化阶段。
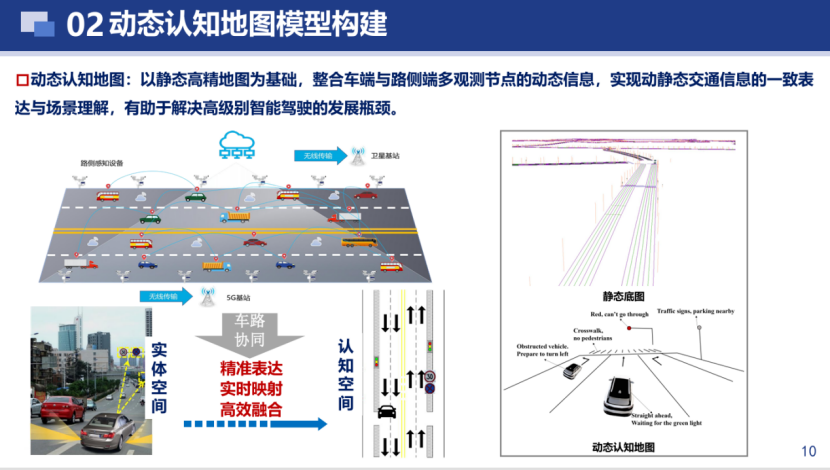
2025年7月22日,武汉理工大学郭圆副研究员在2025第八届智能辅助驾驶大会上表示:动态认知地图以静态高精地图为基准,整合车端与路侧端多观测节点的动态信息,实现动静态交通信息的一致表达与场景理解,可显著提升辅助驾驶系统的安全性、节能性及道路适应能力,有效解决高级别辅助驾驶发展瓶颈。

郭圆 | 武汉理工大学副研究员
以下为演讲内容整理:
研究背景与核心问题
我国车路云一体化技术已实现从概念验证到商业落地的跨越式发展。截至2025年,累计开放测试道路22,000 公里覆盖全国16个省份,发放测试牌照5,200 张涵盖乘用车/商用车多品类,道路测试总里程8,800万公里相当于绕地球2,200圈。政策驱动方面,2018年工信部《车联网产业发展行动计划》建立技术标准体系;2021年"双智"城市试点推动基础设施智能化改造;2024年五部委"车路云一体化"应用试点首次将车路协同纳入国家新基建范畴,标志着技术正式进入商业化部署阶段。通过动态认知地图技术,实现物理道路空间与车端动态信息的实时耦合,为辅助驾驶系统提供更快、更准、更全面的环境认知能力,致力于实现安全、节能、高效运行的目标。

图源:演讲嘉宾素材
高精地图作为实现物理空间到信息空间抽象的核心载体,在传统导航电子地图基础上通过对道路地理要素的几何、属性和关系信息进行精准刻画,其抽象过程体现为将实体道路转化为结构化数据模型,例如武汉大学研发的四层一体化模型。然而现有主流格式包括Shapefile、Occupancy Grid、OpenDrive等仍存在显著局限:一方面过度聚焦静态道路信息,对车辆轨迹、交通事件等动态要素缺乏有效刻画;另一方面模型结构复杂导致采集成本居高不下,且难以支持实时更新需求,严重制约辅助驾驶系统在复杂场景中的实时响应能力。
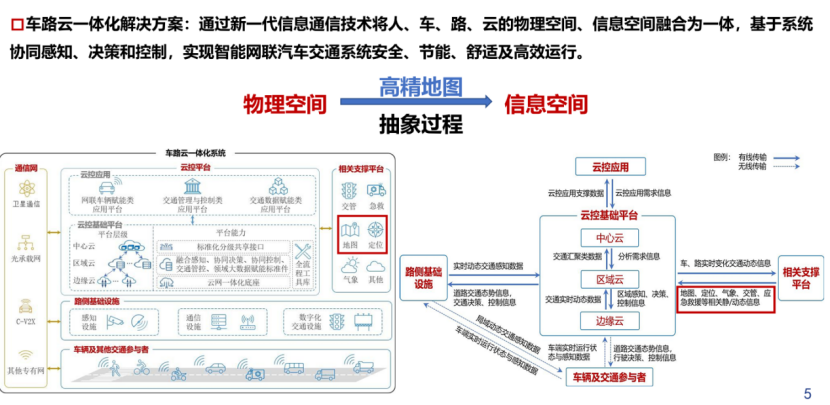
图源:演讲嘉宾素材
动态认知地图模型构建
动态认知地图以静态高精地图为空间基准,通过整合车端传感器与路侧单元的实时感知数据,构建包含三层架构的协同认知模型:底层静态层继承高精地图的车道级拓扑网络,为动态信息提供统一时空参考;动态融合层实时处理多源交通要素的运动状态并基于注意力机制进行行为预测,生成未来5秒的轨迹概率分布;认知图谱层通过视觉语言模型解析交通场景语义,结合图神经网络构建路侧单元从属区域的分层动态图谱,实现交通态势的可解释性推理。该架构支持六大核心功能:交通事件感知实现事故识别、时空态势预测、环境天气感知、车车/车人碰撞预警响应、信号灯相位同步、盲区预警,最终形成"静态打底、动态叠层、认知驱动"的辅助驾驶决策闭环。
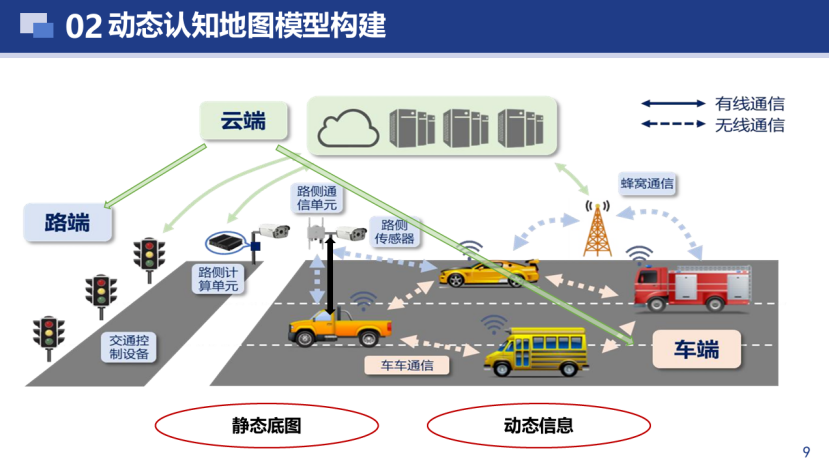
图源:演讲嘉宾素材
动态认知地图模型通过多源时空数据融合机制,实现对六大核心功能的精准支撑:交通事件感知基于路侧雷达与车载传感器多源信息时空关联,可快速识别交通事故、道路施工等事件;时空态势预测采用注意力机制融合历史轨迹与实时位置,预测未来5秒内交通流变化,轨迹预测误差≤0.8米;环境天气感知结合毫米波雷达回波与视觉图像分析,对雨雾冰雪等天气识别;车车/车人碰撞预警通过相对运动学模型计算碰撞时间,实现碰撞预警;信号灯相位提醒实现车端与路侧信号机毫秒级同步;盲区预警与车速诱导利用V2X通信覆盖视觉死角。该功能体系突破传统静态地图局限,构建"感知-预测-决策-控制"的动静态协同闭环,为辅助驾驶系统提供连续可靠车道级定位、秒级响应的全场景支持能力。
图源:演讲嘉宾素材
动态认知地图关键技术突破
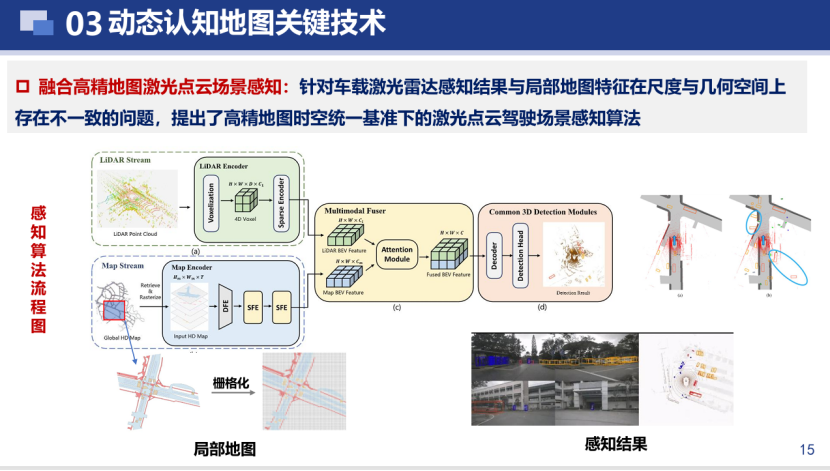
在感知技术创新层面,研究团队提出MENet算法,通过构建高精地图时空统一基准下的激光点云驾驶场景感知框架,将高精地图的几何结构特征(如车道曲率、路缘石拓扑)与激光点云深度信息融合,解决车载感知与局部地图的尺度不一致问题。在公开数据集测试中,该算法目标检测mAP达56.9%,较常用的部署基线CenterPoint提升4.2%,其中卡车识别精度52.3%、公交车66.2%,显著优化交叉口多目标检测鲁棒性。
图源:演讲嘉宾素材
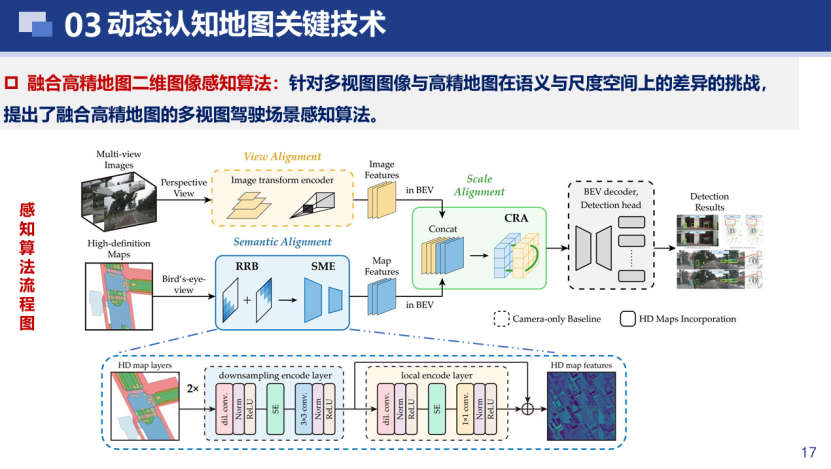
同步开发的MIM模型(Map-incorporated Multi-view)针对多视图图像与高精地图的语义尺度差异,采用分层语义解析技术:首先通过掩码增强(Mask Augmentation)提取地图中的车道标线、交通标志等结构化特征,再结合交叉注意力机制实现图像像素特征与地图矢量化特征的跨模态对齐,最终在nuScenes测试中目标检测mAP达40.9%,尤其将交叉口车辆定位误差降低至0.3米内。
图源:演讲嘉宾素材
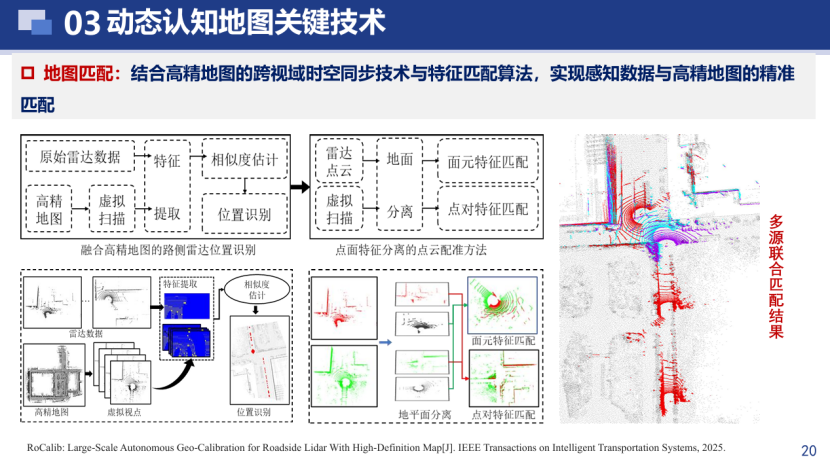
地图匹配领域,基于横向位移估计模型实现车道级定位,横向误差≤0.3米,满足辅助驾驶系统对车道保持的厘米级需求;大尺度点云配准技术RoCalib则通过提取高精地图中的灯杆、标志牌等杆状物特征点云,与路侧雷达扫描数据进行特征匹配,解决路侧设备位姿漂移问题,时间同步精度达毫秒级,为动态认知地图提供时空基准保障。
图源:演讲嘉宾素材
未来挑战与发展方向
当前技术面临三大核心挑战:感知融合难表现为多源异构数据在时空基准对齐时存在毫秒级同步误差,多模态信息融合复杂性导致动态目标识别偏差率最高达15%;动态跟踪难集中于低渗透率场景下,小目标识别检测困难使超视距连续跟踪精度降至65%,尤其对非机动车盲区轨迹预测失效风险显著;表达优化难源于动态信息数据量激增,模型训练数据不平衡导致地图信息精准表达受限。
未来重点攻关方向包括:混合交通场景多源信息耦合技术、轻量化动态地图表达模型、基于普通导航电子地图的动态认知架构迁移,以及低渗透环境超视距跟踪算法优化。研究验证表明,这些突破可使辅助驾驶系统成本降低60%,复杂城市路况场景适应性提升至99.5%可靠度。
(以上内容来自于武汉理工大学郭圆副研究员于2025年7月22日在2025第八届智能辅助驾驶大会上进行的发表的《车路云一体化动态认知地图构建关键技术研究》主题演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。