
岚图汽车:岚图鲲鹏智驾及大模型端到端实践

岚图汽车科技有限公司作为东风汽车旗下高端智慧新能源品牌,秉承56年造车积淀,致力于打造高品质安全的产品,并探索自主事业创新模式。本次演讲聚焦于岚图鲲鹏智驾平台及大模型端到端实践,分享在辅助驾驶领域的技术创新与落地成果,旨在通过多模态大模型端和智能安全策略提升用户体验。
2025年7月22日,岚图汽车科技有限公司辅助驾驶软件开发专家,感知开发总监刘会凯在2025第八届辅助驾驶大会上表示,岚图鲲鹏智驾平台通过大模型端到端技术和安全策略模型,实现辅助驾驶系统的安全上限与下限双重保障,推动行业从高度专注驾驶向偶尔监督的智能化转型。

刘会凯 | 岚图汽车科技有限公司辅助驾驶软件开发专家,感知开发总监
以下为演讲内容整理:
岚图汽车品牌发展与产品布局
岚图汽车作为东风汽车旗下高端智慧新能源品牌,承载着助力东风品牌向上与探索自主事业创新模式的双重使命,依托东风集团56年造车积淀、世界五百强资源以及中国车企专利创新指数领先优势,致力于打造高品质安全的新能源产品。

图源:演讲嘉宾素材
品牌自2020年7月17日正式发布LOGO以来,历时五年快速完成"三年三品类、四年四款车"的战略布局,形成覆盖MPV、SUV及轿车领域的全品类产品矩阵:梦想家MPV蝉联新能源MPV销冠,荣获央视风云盛典"最佳MPV"及伦敦国际设计奖铂金奖;FREE SUV凭借创新设计获中国车身大会特别荣誉勋章及国际CMF设计奖;知音SUV搭载世界十佳电驱动系统,获中汽研"能效之星"认证;追光轿车则通过中国汽研五星健康车认证,斩获青海湖电动汽车挑战赛金羚奖。产品安全性能行业领先,采用二代琥珀云母电池十层防护体系、2000MPa铝硅涂层车门防撞梁及森林级健康空气管理系统,构建电池、车身、座舱三维安全壁垒,奠定品牌高端化发展基石。

图源:演讲嘉宾素材
岚图鲲鹏智驾平台架构与技术优势
岚图鲲鹏智驾平台以天元智能架构为基座,涵盖青云平台、鲲鹏智驾及逍遥座舱三大模块,致力于实现“大车更好开、远行更轻松、视野无死角”的用户体验。平台规划四代产品形态进阶:VADS 1.0支持城区LCC 与高速HNOA;VADS 2.0升级至1000TOPS算力,实现全场景P2P功能;VADS 3.0通过L3架构冗余支持高速领航;VADS 4.0面向L4全量架构。

图源:演讲嘉宾素材
核心系统由鲲鹏全域先知网络、鲲鹏端到端大模型及鲲鹏世界模型仿真平台组成。全域先知网络融合车路云一体化数据,整合政务交管平台、路侧单元及岚图智慧数据共享平台,提供超视距动态事件预测,应对施工占道或恶劣天气等极端场景。端到端大模型采用视觉语言动作一体架构,结合安全策略模型与大模型迭代闭环,提升决策安全下限。世界模型仿真平台通过重建生成3D场景,强化强化学习与数据闭环,加速算法拟人化迭代。

图源:演讲嘉宾素材
大模型端到端实践方案与成果
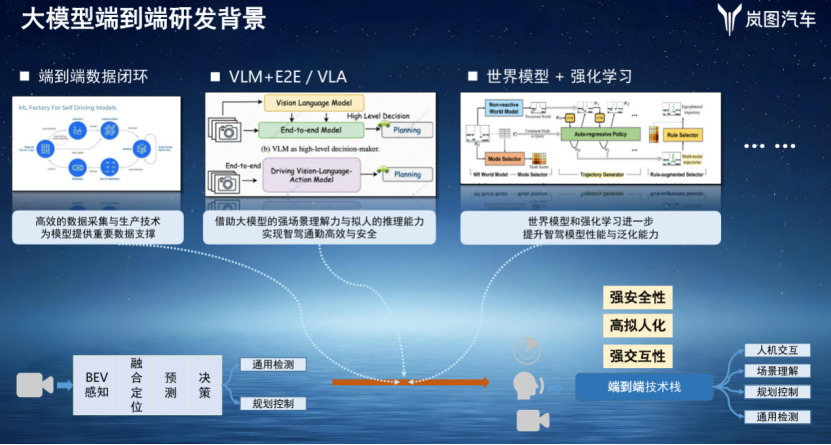
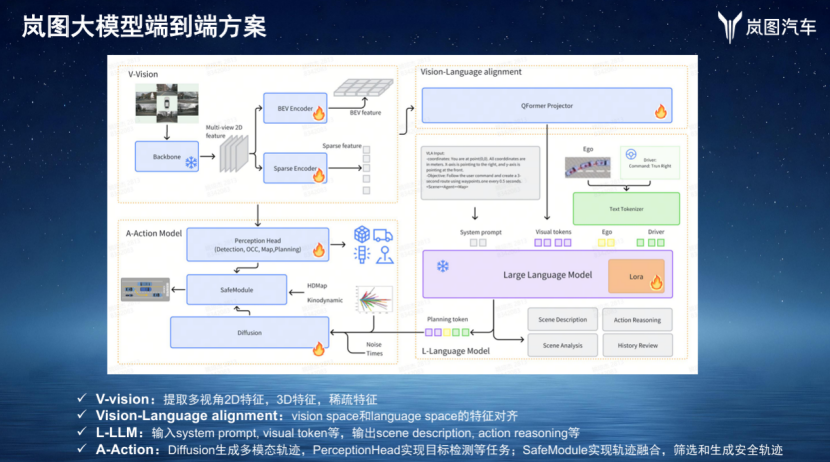
岚图研发的大模型端到端技术聚焦解决传统辅助驾驶系统难以应对的OOD未知异常场景,例如道路堆砂坑、非标准化障碍物等长尾问题,通过融合视觉语言模型突破场景认知边界。该技术方案采用VLA多模态架构:前端特征提取层同步处理激光雷达点云与摄像头图像数据;中端视觉语言对齐模块将物理场景语义化,构建动态场景描述;后端大模型推理系统基于场景理解生成全栈控制信号;最终由安全模块通过轨迹扩散生成多模态候选轨迹,结合风险预估与安全边界筛选输出最优控车轨迹。该架构将自然语言理解与车辆控制深度耦合,实现从感知到执行的端到端闭环优化。
图源:演讲嘉宾素材
在主流端到端方案对比中,E2E VLM架构通过同时输出数字轨迹与文本描述轨迹实现双重冗余,增强用户对辅助驾驶决策的可信度,但其多模态联合训练架构复杂、收敛难度高,且对数据质量要求严苛;VLA方案虽以简洁架构直出控制参数,大幅降低系统延迟,但当前行业成熟度不足,存在控制指令离散化与车辆动态响应匹配的工程瓶颈;岚图方案创新性融合独立安全模块,基于扩散模型生成多模态候选轨迹,通过预埋安全边界策略与动态风险预估算法对轨迹进行实时筛选融合,在保障VLA架构强场景理解力的同时,显著提升系统安全下限,形成技术护城河。
图源:演讲嘉宾素材
实践成果显示,大模型能理解复杂交通标志、特殊车辆状态及手势指令,结合车外麦克风预判意图。落地L3有条件辅助驾驶,实现解放双手双眼,从高度专注转向偶尔监督。系统兜底安全,集成25项主动功能如AEB防误踩、并行避让及超视距协同,覆盖应急与防御场景,提升用户信心。

图源:演讲嘉宾素材
技术趋势与行业挑战
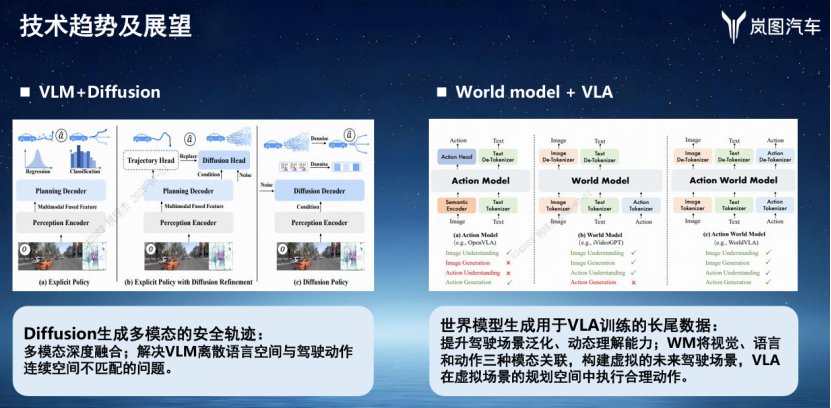
技术趋势指向多模态深度融合,如VLM Diffusion解决语言空间与动作连续空间不匹配问题,生成安全轨迹;世界模型关联视觉、语言与动作模态,生成长尾数据提升场景泛化;视觉CoT优化时空关系表示,增强可解释性;司机Agent集成人类先验知识,实现逻辑推理拟人化。
图源:演讲嘉宾素材
挑战在于数据质量与成本:大模型训练需高效采集生产数据,对多模态数据质与量要求高,开发成本显著。同时,安全策略模型需持续迭代以应对幻觉风险,L3落地依赖法规与基础设施协同。

图源:演讲嘉宾素材
未来展望
岚图大模型端到端技术通过VLA多模态架构实现感知-决策-执行闭环,其核心创新在于融合视觉语言对齐模块实现场景语义化理解,并采用扩散模型生成多模态候选轨迹,再经独立安全策略模块基于动态风险预判与安全边界约束进行轨迹融合筛选,在保障系统强泛化能力的同时显著提升安全下限。
当前技术已实现复杂交通标志解析、非标障碍物规避及外部意图理解等能力,为L3有条件辅助驾驶量产奠定基础,未来将持续优化World Model虚拟数据生成与视觉CoT时空建模能力,协同行业攻克多模态数据成本与长尾场景泛化挑战,推动中国辅助驾驶技术全球竞争力升级。
(以上内容来自于岚图汽车科技有限公司辅助驾驶软件开发专家,感知开发总监刘会凯于2025年7月22日在2025第八届智能辅助驾驶大会上进行的发表的《岚图鲲鹏智驾及大模型端到端实践》主题演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





