Ansys AVx仿真方案助力EURO NCAP 2026

2025年7月22日,在第八届智能辅助驾驶大会上,Ansys亚太辅助驾驶仿真方案主管许富强介绍了EURO NCAP 2026标准的最新动态。他指出,EURO NCAP评价体系从之前被动安全及车辆碰撞安全为核心,转变为全新、全生命周期的评价体系。此次更新大幅提升ADAS在评价体系中的比重,测试场景数量和测试点呈指数级增长,正式认可虚拟仿真作为工程验证手段,首次引入鲁棒性评估层,明确提出对仿真置信度的技术要求。同时,在人机交互(HMI)方面,也提出了更高标准。
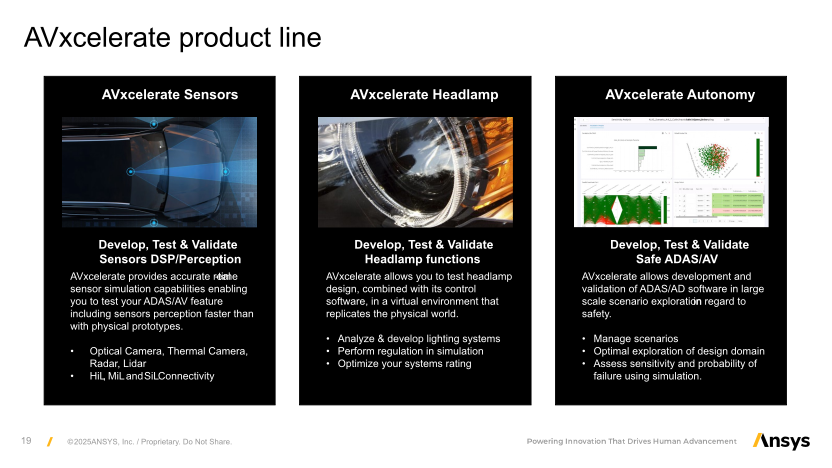
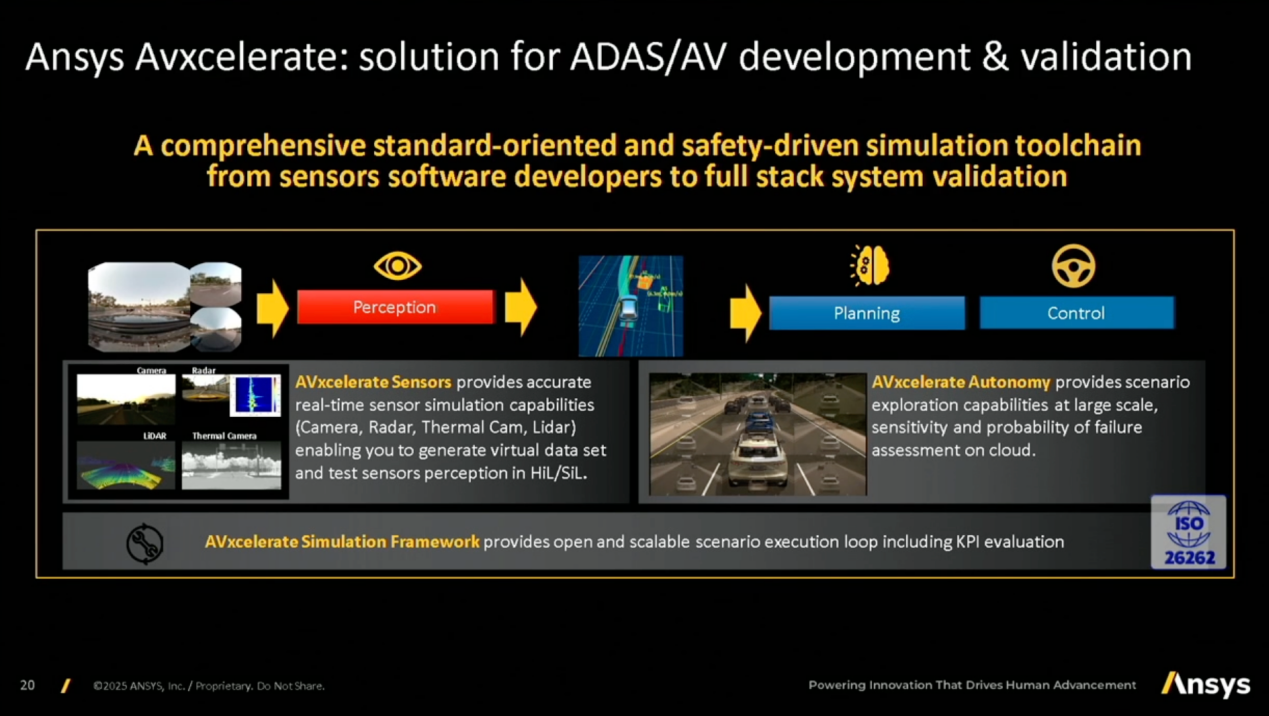
许富强表示, Ansys AVxcelerate辅助驾驶仿真方案由三大模块组成:Sensor、Autonomy与Headlamp。AVx Sensor支持多种传感器物理级仿真, 实现感知算法在环仿真, 显著提升仿真置信度。AVx Autonomy聚焦欧盟ADAS相关法规对ODD、SOTIF的要求, 通过云端进行进行大规模场景泛化,关键场景筛选,敏感性分析及可靠性评估。AVx Headlamp用于整车车灯功能效果虚拟仿真。该平台能有效支持国内OEM在满足Euro NCAP 2026及相关欧盟法规的同时,加速辅助驾驶系统的研发进程。

许富强 | Ansys亚太辅助驾驶仿真方案主管
以下为演讲内容整理:
EURO NCAP 2026解读
2026版Euro NCAP标准相较往年版本进行了显著调整。虽然该标准属于非强制性评价体系,但其在全球汽车行业中具有极高权威性与广泛影响力。
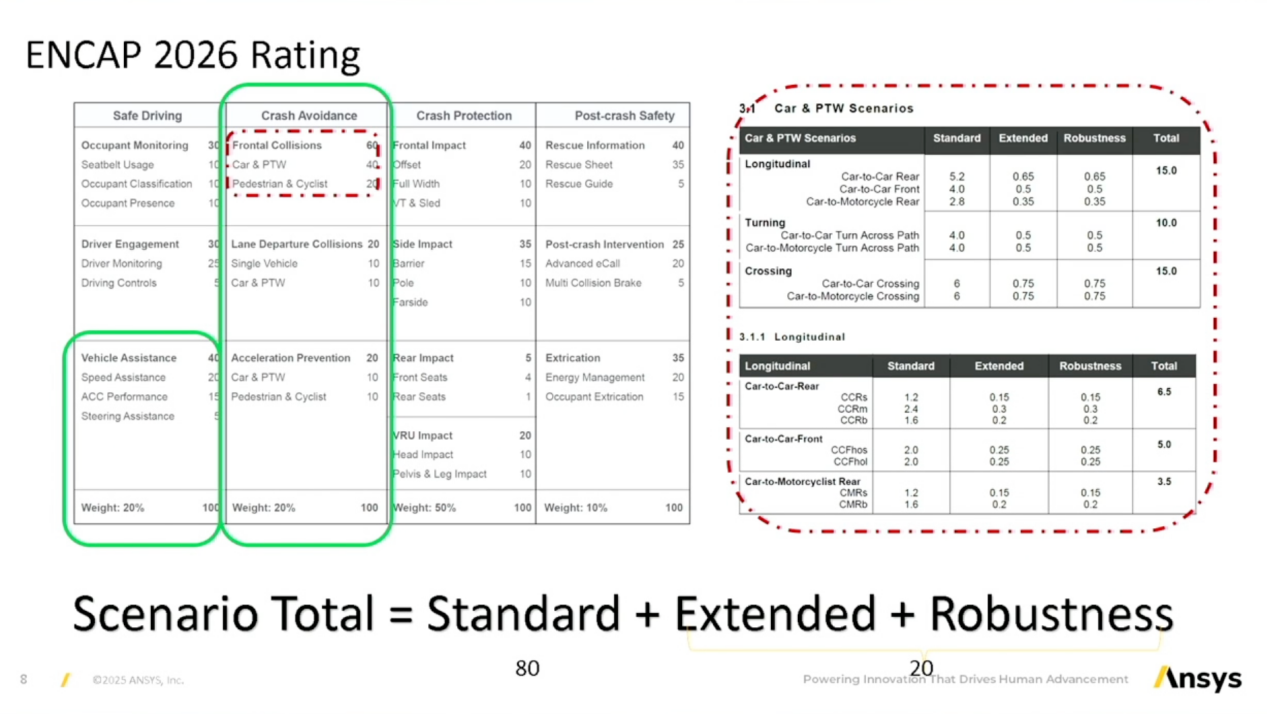
新标准不仅在总体评价结构上进行了重构,还对评分方法做出诸多调整。其中,ADAS功能的评分权重显著提高,相关测试场景数量与场景覆盖广度均大幅提升。尤其值得关注的是,该版本首次正式将虚拟仿真技术纳入测试方法体系,并将其用于鲁棒性(Robustness)评估,以鼓励系统对复杂环境的泛化能力。
在人机交互方面,新标准对驾驶员状态识别与系统联动逻辑提出严格要求。例如,当驾驶员处于非专注状态时,系统需提前激活所有预警与干预策略;若驾驶员保持专注,系统则可适度延迟响应。此举旨在推动ADAS功能与驾驶员状态实现更高层次融合。
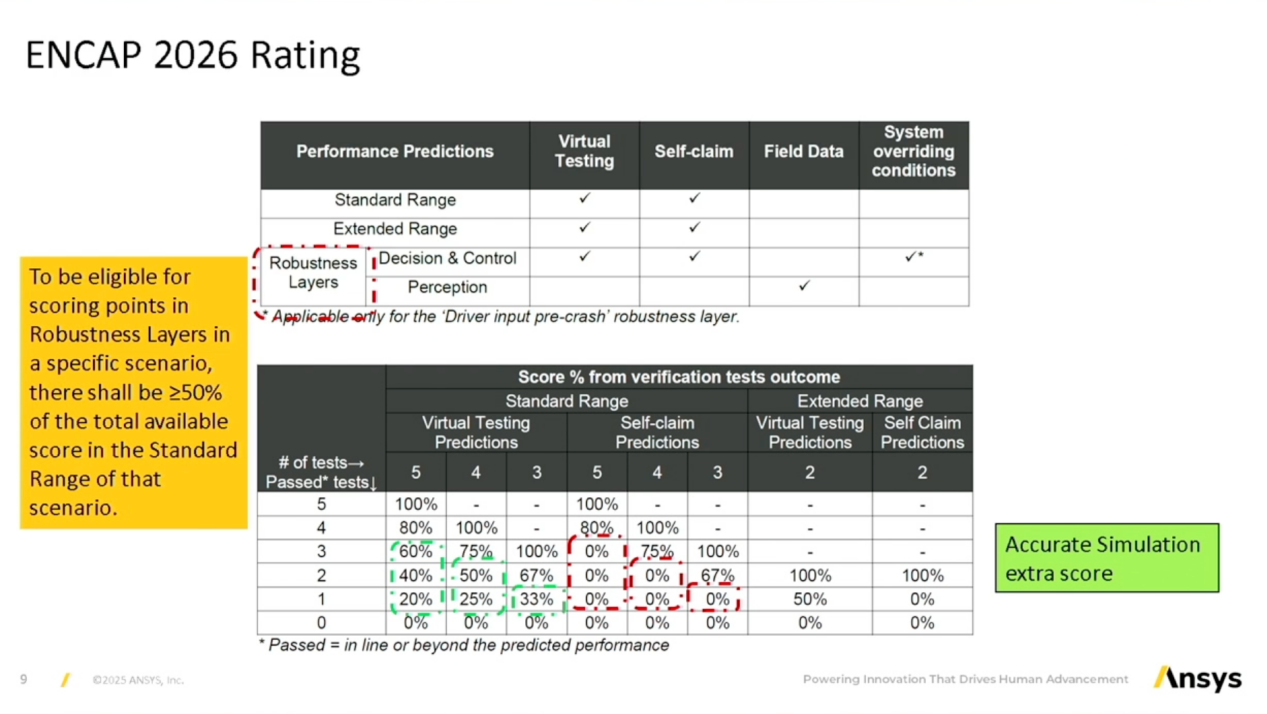
Euro NCAP 2026将每个测试场景划分为三个层级:标准层(Standard Layer)、扩展层(Extended Layer)与鲁棒层(Robustness Layer),每层均有独立评分机制。仿真置信度越高,鲁棒层得分越可观,甚至可能作为奖励分计入总分。
法雷奥与Ansys联合举办的Euro NCAP 2026技术研讨会指出,实际测试点从接近5000个候选中抽取3~5个测试点执行。若要系统性覆盖所有场景,仅依赖实地测试几乎不可行,OEM必须依靠高置信度的虚拟仿真进行补充验证。
图源:演讲嘉宾素材
图源:演讲嘉宾素材
除Euro NCAP外,欧盟GSR法规(如R152、R157、R171)对ADAS系统的开发与验证流程亦提出更高要求。虽然R157未强制虚拟仿真,但要求OEM明确定义ADAS系统能力与系统边界,这类信息往往需借助虚拟仿真完成。R171与R152更是直接并鼓励将虚拟仿真纳入官方认可的验证手段之一。
在此过程中,敏感度分析(Sensitivity Analysis)与可靠性分析(Reliability Analysis)成为关键工程工具。前者通过设计实验(DoE)方法识别影响系统性能的主要因素,辅助系统架构与控制逻辑优化;后者结合统计学方法评估辅助驾驶系统在ODD范围内的失效概率,从而实现风险量化与管理。
回顾整个ADAS虚拟仿真及行业现状,目前国内在SOTIF和功能安全仿真分析方面,与ADAS功能开发过程相互独立。 如何将SOTIF和功能安全分析与ADAS功能开发流程相结合,是国内OEM当前面临的主要问题。
当前国内众多OEM厂商的产品在出口至欧洲时,需满足欧洲多项ADAS法规要求,如R157法规等。如何确保产品不仅符合欧盟的产品标准,同时研发流程也满足欧盟法规要求,成为国内OEM面临的一大挑战。
Ansys AVx辅助驾驶仿真方案介绍
Ansys AVxcelerate辅助驾驶仿真方案由三大模块组成:Sensor、Autonomy与Headlamp。AVx Sensor支持多种传感器物理级仿真, 实现感知算法在环仿真, 显著提升仿真置信度。AVx Autonomy聚焦欧盟ADAS相关法规对ODD、SOTIF的要求, 通过云端进行进行大规模场景泛化,关键场景筛选,敏感性分析及可靠性评估。AVx Headlamp用于整车车灯功能效果虚拟仿真。该平台能有效支持国内OEM在满足Euro NCAP 2026及相关欧盟法规的同时,加速辅助驾驶系统的研发进程。
图源:演讲嘉宾素材
图源:演讲嘉宾素材
AVx Sensor支持相机、毫米波雷达、激光雷达与红外传感器的物理级仿真,基于真实物理规律构建感知模型,覆盖:
· 传感器建模:基于具体传感器类型(如相机、雷达、激光雷达等)进行建模,模拟光学系统、信号响应、探测范围与噪声特性,使输出信号具备实际物理特征。
· 光线追踪(Ray Tracing):利用物理级路径追踪算法,模拟光线或电磁波从传感器发出或接收过程中的传播、反射、折射与散射,精确还原信号与环境交互过程。
· 材料建模:环境中物体表面基于BRDF(双向反射分布函数)、RCS(雷达散射截面)等模型,定义其对不同波长信号的响应,实现对不同天气、材质、颜色等因素的感知模拟。
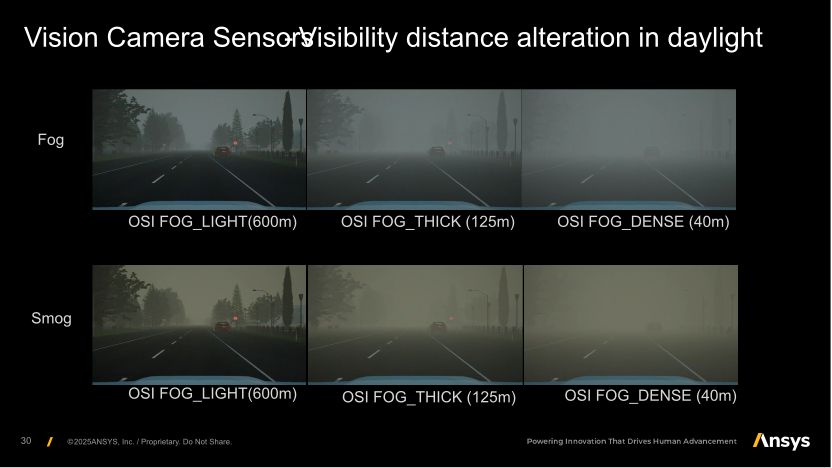
该方法支持真实场景下复杂交互(如雨、雾、夜间等)对传感器性能的影响分析,广泛用于ADAS与自动驾驶系统的感知验证与鲁棒性评估。
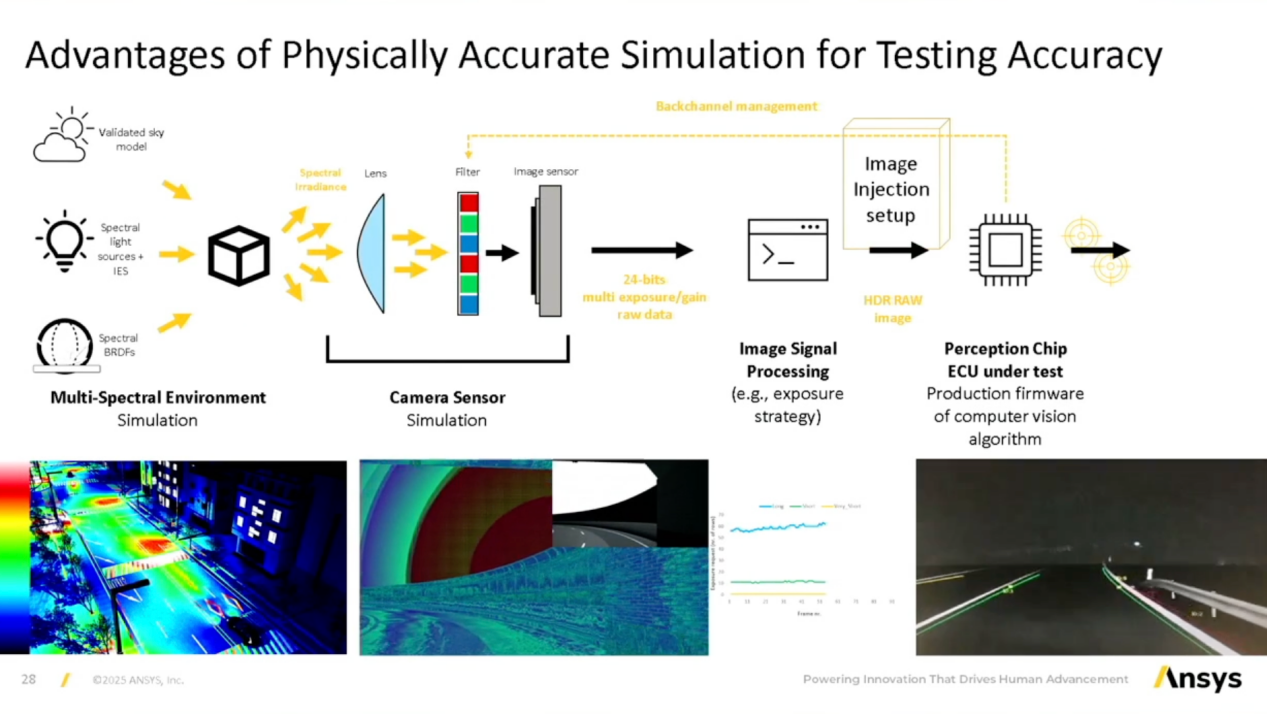
以AVx Sensor中相机为例, AVx Sensor对相机进行1:1建模,从镜头到图像传感器至ISP的完整相机模型。在建模过程中考虑环境材料的影响因素,成像路径基于逆向光线追踪,实现较高的成像真实度。尽管计算量较大,受益于GPU加速,已可以实现对目前主流800万像素相机的实时仿真。
AVx Sensor能够真实地仿真各类极端天气状况,以及与光照相关的多种极端工况。在中国最新的L2级自动驾驶法规中,存在一些与SOTIF天气相关的测试要求,AVx Sensor可以针对这些极端天气场景进行感知仿真。
图源:演讲嘉宾素材
图源:演讲嘉宾素材
毫米波雷达的仿真类似,AVx Sensor能够很好的仿真毫米波雷达的各种极端场景。例如在隧道场景中,由于存在大量电磁波反射,容易导致毫米波雷达误报等现象,针对此类极端情况,AVx Sensor可进行高质量的毫米波雷达感知仿真。
AVx Autonomy通过导入OpenDRIVE与OpenSCENARIO格式场景,结合参数设定与概率定义,开展大规模场景泛化工作。系统集成Ansys optiSLang优化引擎,支持多维KPI驱动下的全局优化与场景筛选,自动完成敏感度与可靠性分析。
该仿真方案显著减少后续实车与场地测试压力,并为功能安全分析工具如Ansys Medini提供输入输出闭环。当前Ansys已与国内OEM开展联合Demo项目,实现SOTIF分析与仿真协同验证。
Medini是 Ansys公司功能安全与预期功能安全的仿真分析软件
optiSLang是Ansys公司支持设计优化与不确定性量化(UQ)的仿真软件。其功能涵盖:
· 参数敏感性分析(识别关键变量)
· 多目标优化(支持多种优化算法)
· 可靠性分析(结合统计建模评估失效概率)
· 流程自动化(跨工具链仿真耦合与迭代执行)
optiSLang适用于汽车、航空、能源等领域的复杂产品设计流程,提高设计效率与可靠性。
(以上内容来自Ansys亚太辅助驾驶仿真方案主管许富强于2025年7月22日在第八届智能辅助驾驶大会发表的《Ansys AVx仿真方案助力EURO NCAP 2026》主题演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。