丰田研究院研发出全新机器人 仅需一次训练便能习得类人技能

虽然机器人在探索遥远行星、执行复杂手术等技术上表现卓越,但是它们仍难以胜任若干基本的人类任务。其中最严峻的挑战之一是关于灵巧性的问题,即抓取、握持和操作物体的能力。而这一局面如今已被打破。据外媒报道,马萨诸塞州丰田研究院(Toyota Research Institute)的科学家已训练出一款机器人,使其像人类一样运用全身力量搬运大型物体。
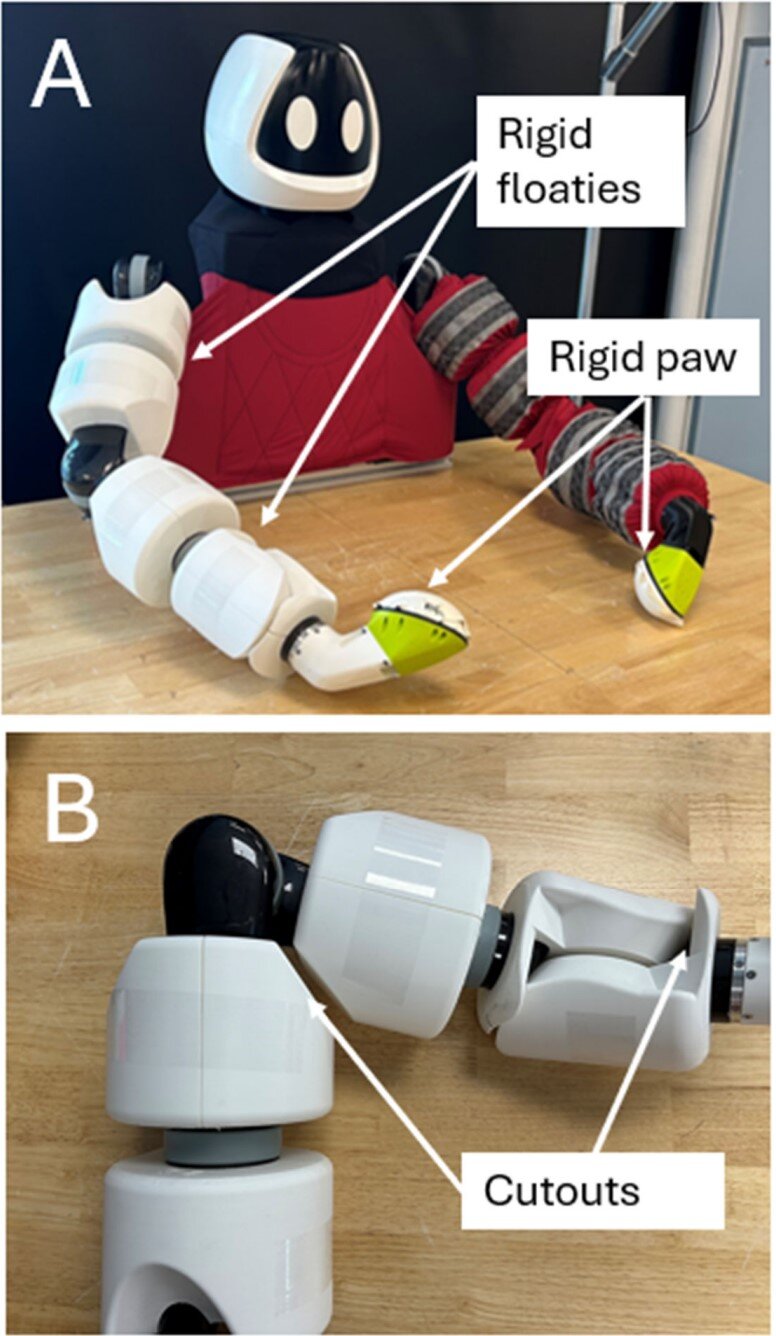
图片来源:期刊《Science Robotics》
人类运用多种技能拾取和操控物体,从精细的手部动作到涉及手臂、腿部和躯干的大肌肉运动(粗大运动技能)。机器人难以完成这类大动作,例如抬起并稳住大箱子,因为这需要持续进行复杂调整,以防止物体滑落或掉落。
发表于期刊《科学机器人(Science Robotics)》的论文中,研究团队展示了名为Punyo的人形上肢机器人是如何将大型水壶扛上肩头,并且还能拾取并稳稳托住大箱子的。该机器人通过柔软的压力感应皮肤和关节传感器反馈来控制动作。
该机器人成功的关键在于其身体的柔软性(被动顺应性)和关节中编程的灵活性(主动顺应性)。与刚性版本相比,其表现显著提升。科学家指出:“添加任何类型的顺应性(即被动、主动或两者兼具)都有益处,与无顺应性相比,其成功率平均提升206%。
此外,该机器人仅需极少的培训即可使用。研究人员采用一种名为“示例引导强化学习”的方法对Punyo进行训练。研究人员仅需在虚拟环境中进行一次演示操作,该机器人便能自主练习直至掌握要领。研究团队补充道:“通过仿真采集的单次遥操作演示,就足以训练出适用于风格化、高接触动作的策略。”
这项技术是迈向创造出在日常生活中更实用机器人的重要一步。例如,它们能够安全可靠地搬运大型笨重物品,如家中的家具或仓库里的重型包裹。它们甚至能在护理场景中帮助完成任务,如协助行动不便者。更值得一提的是,这些机器人无需精密的程序,而仅需一次示范便能习得类人技能。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。