牛津大学研发出“无脑”同步运动机器人 完全依靠空气驱动

据外媒报道,由牛津大学领导(University of Oxford)的一个团队开发出一种新型软体机器人,它们无需电子元件、电机或计算机,仅利用气压即可运行。这项发表在期刊《Advanced Materials》上的研究表明,这些“流体机器人”能够产生复杂而有节奏的运动,甚至可以自动同步动作。
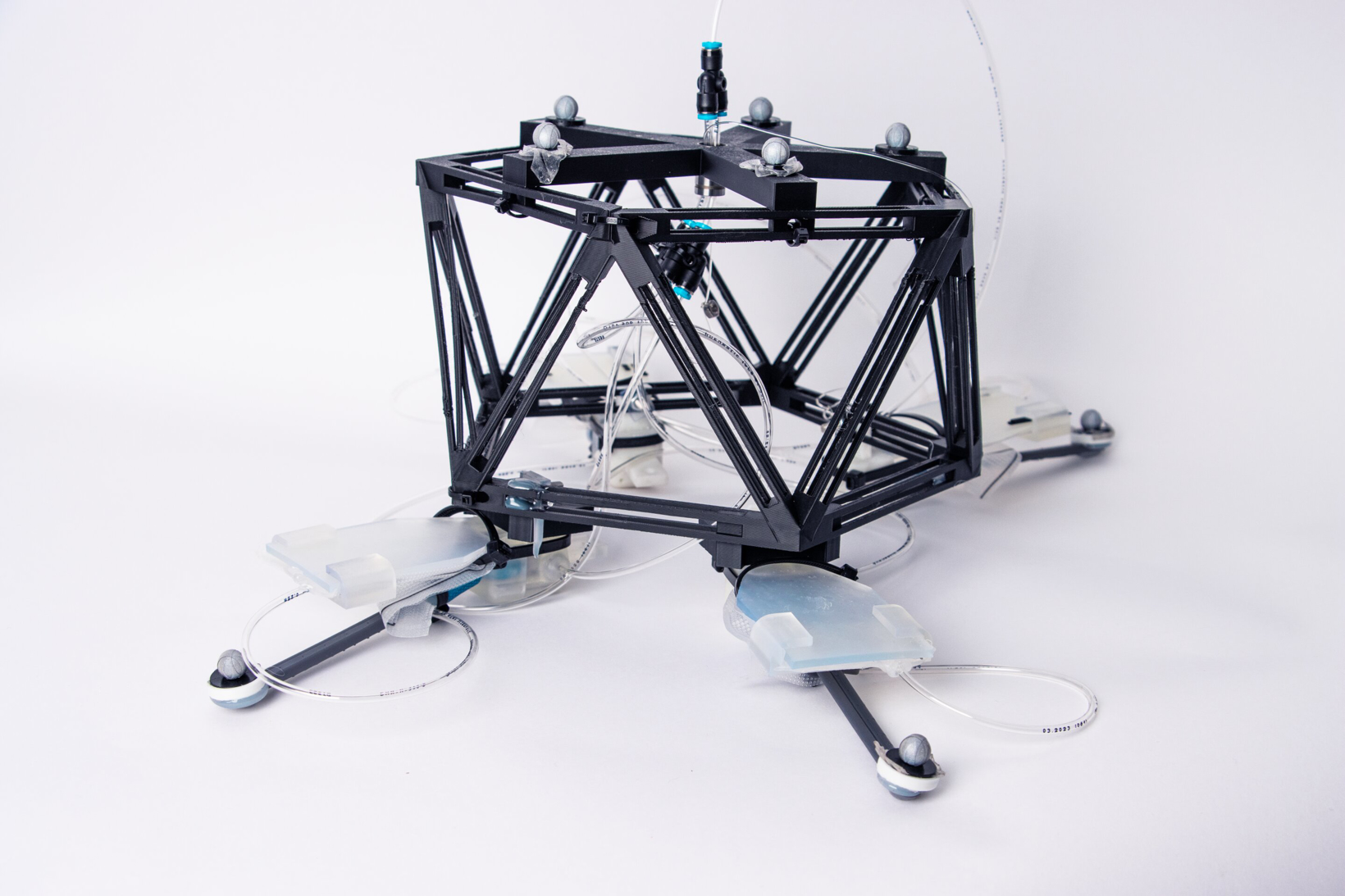
图片来源: 牛津大学
牛津大学工程科学系教授、RADLab负责人Antonio Forte表示:“我们很高兴看到,这些无脑机器能够自发地产生复杂的行为,将功能性任务分散到外围,从而释放资源用于更智能的任务。”
克服软体机器人领域的关键挑战
软体机器人(由柔性材料制成)非常适合执行诸如在崎岖地形上行走或搬运易碎物品等任务。软体机器人领域的一个主要目标是将行为和决策直接编码到机器人的物理结构中,从而打造更具适应性和响应性的机器。
这种源于身体与环境交互的自动行为通常难以用传统的电子电路来复制,因为传统的电子电路需要复杂的传感、编程和控制系统。
为了应对这一挑战,研究人员从自然界汲取灵感。在自然界中,身体部位通常承担多种功能,无需中央控制即可实现同步行为。他们的关键创新在于开发了一种小型模块化组件,该组件利用气压来执行机械任务——类似于电子电路利用电流的原理。根据不同的设置方式,这个模块可以:
响应气压变化而运动(移动或变形)——如同肌肉一般。
感知压力变化或接触——类似于触摸传感器。
切换气流的开/关状态——如同阀门或逻辑门。
与乐高积木类似,多个相同的单元(每个单元尺寸仅几厘米)可以连接起来,组成不同的机器人,而无需改变基本的硬件设计。在这项研究中,研究人员构建了桌面机器人(大小与鞋盒相仿),这些机器人可以跳跃、摇晃或爬行。
在特定的配置下,研究人员发现每个单元都可以自动同时完成这三种动作,一旦施加持续的压力,就能完全自主地产生有节奏的运动。当几个这样的响应单元连接在一起时,它们的运动会自然而然地同步,无需任何计算机控制或编程。
这些行为被用于制造摇晃机器人(能够通过倾斜旋转平台将珠子分拣到不同的容器中)和履带机器人(能够检测桌子边缘并自动停止,防止跌落)。在每种情况下,协调运动都是完全机械实现的,无需任何外部电子控制。
论文第一作者Mostafa Mousa博士(牛津大学工程科学系)表示:“这种自发协调不需要预先设定的指令,完全源于各个单元之间的耦合方式以及它们与环境的相互作用。”
为具身智能奠定基础
至关重要的是,这种同步行为仅在机器人相互连接并接触地面时才会出现。研究人员使用了一种名为Kuramoto模型的数学框架来解释这种行为,该模型描述了振荡器网络如何实现同步。
这表明,当机器人通过环境进行机械耦合时,仅凭其物理设计就能产生复杂的协调运动。在这种情况下,每条机器人腿的运动都会通过共享的机体和地面反作用力微妙地影响其他腿。
这形成了一个反馈回路,摩擦力、压缩力和回弹力将肢体的运动联系起来,从而实现自发协调。
Mousa博士表示:“就像萤火虫在相互观察后会开始同步闪烁一样,机器人的气动肢体也会形成节奏,但这种节奏是通过与地面的物理接触而非视觉线索实现的。这种涌现行为此前已在自然界中观察到,而这项新研究代表着在可编程、自智能机器人领域迈出的重要一步。”
尽管目前研发的软体机器人尺寸尚在桌面级别,但研究人员表示,其设计原理与尺寸无关。在不久的将来,研究人员计划深入研究这些动力系统,以构建节能型无线移动机器人。这将是朝着在能源匮乏且需要高度适应性的极端环境中大规模部署这些机器人迈出的重要一步。
Forte教授补充道:“将决策和行为直接编码到机器人的物理结构中,可以制造出无需软件‘思考’的自适应、响应迅速的机器。这标志着机器人从‘拥有大脑的机器人’向‘自身就是大脑的机器人’转变。这将使它们速度更快、效率更高,并且可能更擅长与不可预测的环境互动。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。