上汽集团:安全、高效、自主-高级辅助驾驶的开发路径与实践

2025年10月30日,在第十三届汽车与环境创新论坛上,上汽集团大乘用车研发部智能驾驶总监张栋林介绍了上汽集团在高级辅助驾驶开发中的核心策略理念与实践路径。他强调,上汽集团以用户关切为出发点,围绕安全、安心、舒心三大理念构建技术体系,通过跨域技术融合与数据平台建设夯实基础,同时依托自主研发的电气架构与Drive OS系统,聚焦高速驾驶与泊车场景,推动算法迭代与产品优化。
张栋林指出,行业需明确辅助驾驶与自动驾驶的责任边界,倡导人机共驾的互补模式,确保用户在安全与体验的双重保障下享受智能化出行。

张栋林|上汽集团大乘用车研发部智能驾驶总监
以下为演讲内容整理:
上汽大乘用车辅助驾驶开发路径
针对汽车行业,无论技术探讨如何深入,最终都需落实到产品层面。因为产品需面向市场销售,销售行为将创造价值,带来营收与利润,这些收益可再投入新技术的研发,进而挖掘新的产品机遇,形成持续滚动的良性循环。当然,这些产品的最终归宿是用户。无论是技术研发、技术创新还是新技术的应用,均需以用户为导向。
用户关切何在?这始终是上汽集团创新研发总院在技术研发过程中深入思考的核心问题。在技术开发与产品应用过程中,理念问题至关重要。在开展驾驶辅助研发时,上汽集团提炼出了安全、安心、舒心三大理念,构建了一个稳固的三角结构。

图源:演讲嘉宾素材
首先,安全不仅是技术的基础与目标,更是技术体系的稳固底座,同时也是赢得用户信任的起点。无论是传统零部件的开发,还是新技术的研发;无论产品面向国内用户还是海外用户,安全始终是首要考量。在面对用户,尤其是针对驾驶辅助及主动安全技术时,除确保安全外,更重要的是要给予用户安心感,让用户愿意使用、敢于使用。
用户的选择是产品成功的试金石。当产品畅销或热销时,便能转化为可盈利的商品。然而,仅有安全和安心尚不足够,这仅是迈出的第一步。特别是随着智能化的发展,我们还需要为客户带来舒心的体验。在此过程中,整车作为重要载体,承载着众多场景的实现。
车辆并非单一系统,它既涵盖了整车机电一体的结构体,也包含了类似大小脑的智能核心,还涉及座舱系统与客户的交互体验。在营造舒心感受方面,更多是需要通过跨域技术的融合来实现。
基于安全、安心、舒心这三大理念,我们在开发过程中构建了技术底座和分层体系。下图中最上层无疑是面向产品的目标设定;中间这一层,即我们所说的算法层,往往被视为核心技术所在,各家企业在此领域拥有不同的技术范式、路径及积淀。无论如何,这些技术范式或算法开发,最终都要应用在车辆上并转化为实际的产品,其成果必须得到市场、消费者及用户的认可,同时还要具备可持续性。

图源:演讲嘉宾素材
此外,当前随着智能化进程的推进以及算力平台的持续扩容,各家企业纷纷加大数据平台建设的投入力度,数据领域已成为竞争焦点。在这方面,上汽也取得了一定进展。上汽虽然在整车产品力提升及海外市场拓展方面发展迅速,但在基础积累与基础设施建设层面仍处于追赶阶段。目前,集团正积极推进旗下各个子品牌的协同与整合工作。
之外,上汽旗下的零束科技公司已成功研发新一代电气架构,并打造了应用于MG4车型的驾驶辅助域控制器计算平台。该平台采用全栈自主开发模式,我们开发了Drive OS系统,实现全链路贯通。通过该系统,我们能够打通整个数据链条,推动算法迭代升级,并持续优化产品,为客户提供更优质的体验。除了技术底座,我们还将产品定义聚焦于高速驾驶与泊车两大场景。
图源:演讲嘉宾素材
当前,智能化发展迅猛,无论是芯片、SoC,还是车端算力、云端算力,均呈现出持续攀升的态势。对于我们而言,除堆砌更多算力与硬件外,还需要充分考虑整车成本。我们需要在成本约束下确保用户体验不降级,这是一个需平衡与妥协的三角关系。最终,我们的控制器从聚焦的需求出发,选定了由3颗毫米波雷达、6个高清摄像头及12个超声波雷达组成的“3R6V12U”传感系统方案。围绕该方案,我们的控制器采用了地平线J6E芯片,该芯片属于中算力平台,算法亦运行于其上。
不过,受限于中小算力,智能辅助驾驶领域可部署的模型与算法较为有限。上汽集团的优势在于有强大的整车集成能力,无论是底盘还是座舱领域均具备显著优势。底盘系统涵盖X方向的加速与制动控制,以及Y方向的横向精准操控。结合智能辅助驾驶算法所采用的时间与空间联合规划新范式,可为用户带来卓越体验。
全场景泊车 产品实践
目前,上汽集团聚焦于全场景泊车方案的研发,除了基本的自动泊车与遥控泊车功能外,还新增了离车泊入、DIY泊入等创新功能点。同时,我们积极拓展终端控制方式,除手机遥控外,还实现了手表遥控泊车。
这些功能的实现一方面受限于开发进度,另一方面也受到国家相关规范约束,但在后续开发过程中将持续进行迭代优化。在泊车功能研发中,我们并未追求全面覆盖的“六边形战士”模式,特别是在小算力平台条件下,我们选择聚焦核心亮点进行突破。
一方面,我们为泊车功能赋予了“车位猎手”“停车模范”和“无惧黑暗”等专属标签。其中,“车位猎手”的最大特点在于搜索车位速度快,在媒体试驾过程中,我们在多个场景下进行了展示:车辆进入停车区域转弯时即可快速识别车位。基于当前的中算力平台,我们实现了一次性最多释放8个可泊车位的功能,虽与行业标杆存在差距,但还是具备一定竞争力。
同时,我们在停车控制上设定了明确目标:确保车位识别更精准、停车不压线,且停车姿态的完整性与规整性更优。
我们还有一个颇具特色的小亮点,泊出功能。目前,部分企业的泊出功能存在一定限制条件,要么不具备该功能,要么仅能基于自动泊入后的路径记录进行泊出规划。而我们的MG4车型上所搭载的这套方案,能够在任何时候实现平行车位和垂直车位的泊出操作。
高快导航驾驶辅助 HNOA产品实践
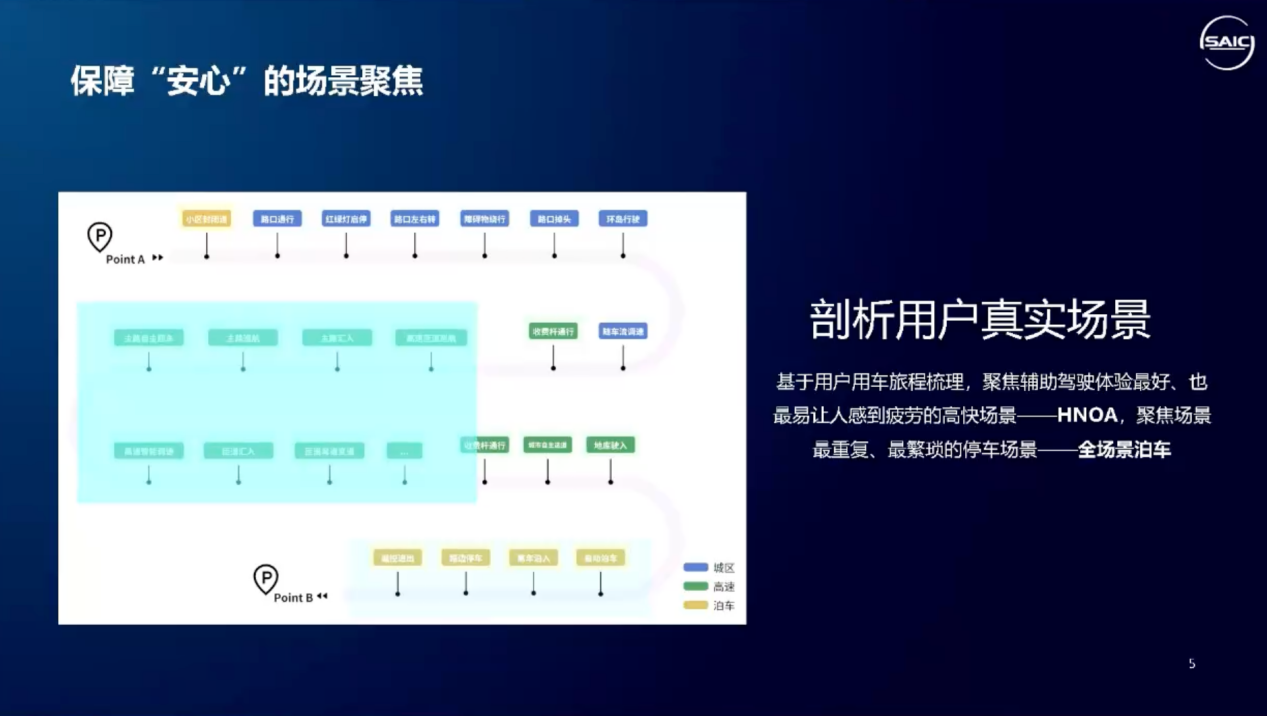
另一重点聚焦领域为高速领航辅助功能。在此方面,我们专注于高速场景的优化,涵盖从进入收费站开始至驶出收费站前的全过程。而对于其他地面道路,则仅提供基础的LCC功能。我们重点思考的方向是如何做好高速路段的服务表现,对此,我们从安全与体验两个维度展开。驾驶过程中只有使用安心、体验舒心,具备安全感与好用性,客户才会愿意使用这一功能。
图源:演讲嘉宾素材
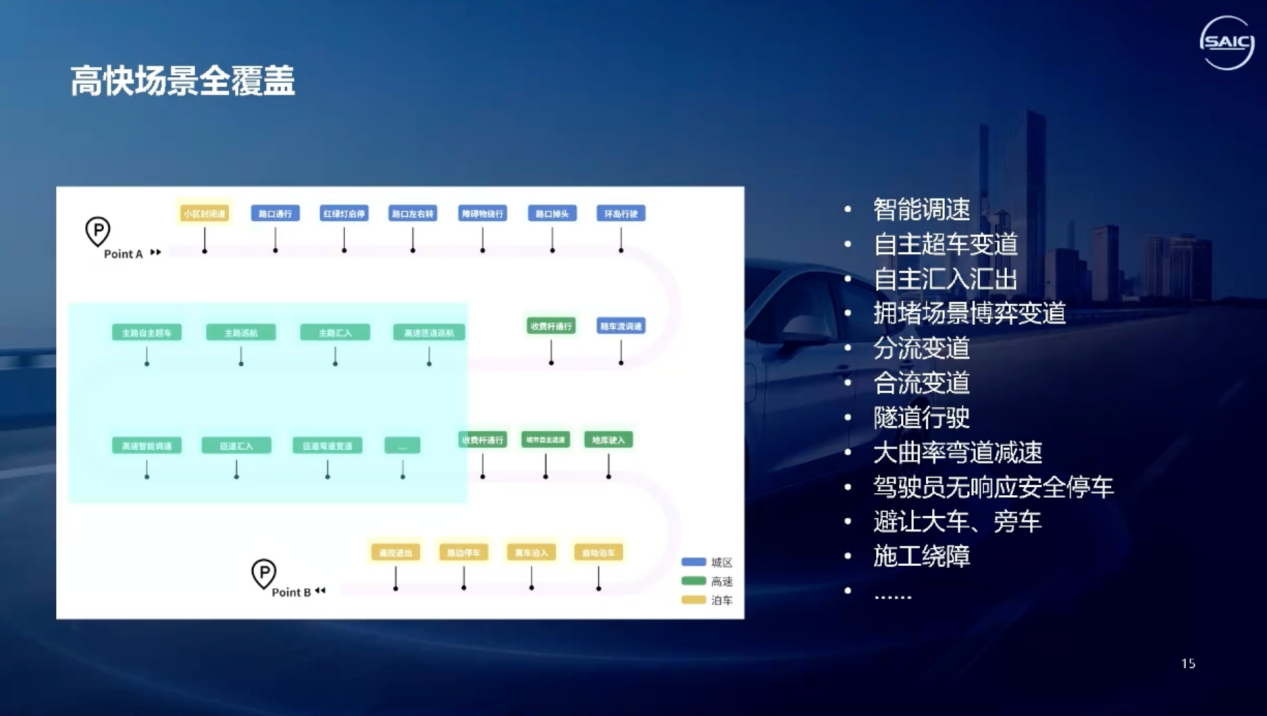
安全基础层面,我们重点关注施工场景,如锥桶场景、水马场景等。我们在试车过程中发现,遇到锥桶时,整车规控可能会出现偏移,因为锥桶的摆放未必完全沿车道线进行。另外,面对水马场景,例如进入隧道且存在水马时,车道线较为繁杂,我们会进行主动避让,这些均体现在细节处理之中。
使用驾驶辅助功能时,尤其在高速高架路段遇到拥堵工况时,低速Cut-in和低速绕行往往令人困扰。在天气良好、道路标线清晰、车流量可控的条件下,驾驶辅助功能确实能带来舒适的驾驶体验。然而,一旦路况变得复杂,就会引发诸多问题:要么系统频繁发出警示音,要么提示“退出,请接管”,甚至出现鲁莽操作,给驾驶者带来冲击感。
基于上述的场景和现象,我们在进行算法策略开发时考虑了人类驾驶员的特性和习惯,例如在一次测试过程中,测试车辆从通畅的主路汇出,此时匝道拥堵,一方面,车辆跟随车流逐步汇出主路;另一方面,在跟车过程中,我们设计了一个小绕行动作,先与前车保持同步,再择机变道。同样,在另一个测试场景中,车辆进入施工区域并即将驶入隧道,且旁边有施工围挡的河流时,整车会先轻微减速,再进行适当避让。车辆进入隧道区域后,遇到水马时主动避让,整个控制过程流畅自然。
在测试与验证过程中,我们会对这些场景数据进行精准抓取,并持续进行优化打磨。除高速高架场景外,在地面道路测试中,当车辆行驶至弯道且临近公交专用道,同时前方右侧存在违停车辆时,系统能够完成识别并实施绕行操作。
此类功能表现虽看似接近自动驾驶水平,但其实际上是基于中算力平台实现的。车速控制在特定范围内时,系统的识别与控制能力可满足需求;然而当车速提升时,受限于计算能力和感知限制,其性能表现会受到明显制约。因此,我们始终强调需构建人机互补的共驾状态。传统意义上的人机共驾多聚焦于体验舒适性,例如通过方向盘扭矩分配实现“驾驶员主导时系统辅助,系统主导时驾驶员监督”的协同控制,最终使车辆行驶轨迹符合驾驶员预期。
但车辆对环境的判断有其固有逻辑,而驾驶员则凭借自身经验进行操作,若二者能形成良好匹配,便可带来优质的驾驶体验。不过,这种模式更适用于高阶驾驶员,而非高级驾驶辅助系统本身,当驾驶员与车辆配合默契时,确实能提升体验感与舒适性,但对于新手驾驶员而言,则可能较难掌握其中分寸。但换个角度看,这也正是车辆智能化发展的重要方向,既要将老司机或熟练驾驶员的能力赋予车辆,又要兼顾驾乘人员的心理感受。唯有如此,才能真正构建起智能体。
基于此,我们提出倡导,在驾驶辅助过程中,用户需保持敬畏之心,适度信任系统。毕竟,系统在部分场景中的优异表现,并不意味着在所有场景下都能同样可靠。唯有在此前提下,才能实现安全、有效的使用。
最后,我们明确提出一个观点,辅助驾驶并不等同于自动驾驶。无论采用大算力还是小算力平台,无论运用何种算法、模型或技术范式,在现阶段均属于辅助驾驶范畴。
我们坚信自动驾驶时代终将到来。随着L3级标准落地实施,以及L4级车型获得国家认证,自动驾驶将逐步成为现实。驾驶辅助系统和自动驾驶系统真正的过渡和切换,本质上是责任主体的转移,而非体验感的简单升级。我们致力于在提升车辆体验的同时,明确划分责任边界,最终目标是确保驾驶员与乘坐者均能享受安全无忧的出行体验。
(以上内容来自上汽集团大乘用车研发部智能驾驶总监张栋林于2025年10月30日-31日在第十三届汽车与环境创新论坛发表的《安全、高效、自主:高级辅助驾驶的开发路径与实践》主题演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。