
博世牵头研究项目发明新机制 显著提高互联自动驾驶系统安全

未来,互联互通和数字化将在道路交通中扮演日益重要的角色。这固然能够提升效率和安全性,但也对数据交换的可靠性提出了挑战。为期三年的ConnRAD研究项目正是在此背景下应运而生。该项目旨在为确保互联出行系统即使在信息不完整或存在不确定性的情况下也能在道路交通中可靠运行奠定重要基础。这里的关键词是“韧性”。

图片来源: 博世
ConnRAD是“德国自动驾驶功能互联与韧性”(connectivity & resilience for automated driving functions in Germany)的缩写。在博世(Bosch)的领导下,项目团队由戴姆勒汽车信息技术创新中心(DCAITI)、弗劳恩霍夫工业通信系统研究所(FOKUS)、弗劳恩霍夫机电一体化研究所(IEM)、萨尔应用科技大学(htw saar)、英飞凌(Infineon Technologies AG)、慕尼黑工业大学(Technische Universität München)、TÜV SÜD(德国技术监督协会南德意志集团)、乌尔姆大学(Universität Ulm)——研究了未来如何以稳健的方式设计、开发和发布互联交通系统。该项目由德国联邦研究、技术和空间部(Federal Ministry of Research, Technology and Space)资助。
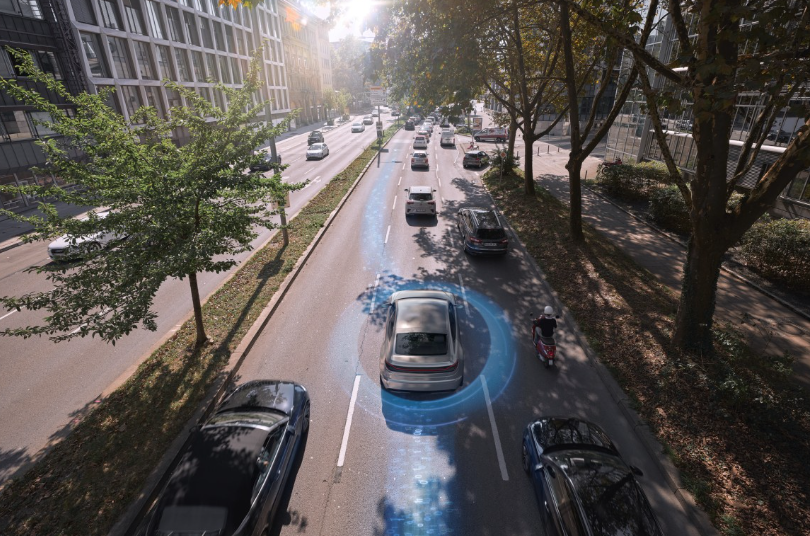
ConnRAD 的研究成果有助于提升左转弯的安全性
与环境中的其他车辆以及交通信号灯等基础设施进行信息交换,可以提高自动驾驶功能的效率。在技术术语中,这被称为V2X通信(车联网)。然而,此类数据的可靠性可能存在显著差异。根据交通状况、天气情况或信息来源的不同,数据可能受限、质量较差,甚至完全不可用。为了应对这些缺陷并充分利用现有数据,自动驾驶系统需要确保交换的信息和数据通道具有可量化的可靠性。
图片来源: 博世
据外媒报道,ConnRAD项目团队开发了一种机制,使道路交通中的通信伙伴能够验证和评估自身以及彼此的可靠性和适用性。基于此评估,接收车辆的系统会判断特定的通信伙伴及其传输的信息是否足够可靠,足以支持安全关键的驾驶功能。只有通过验证,接收到的V2X信息才会用于此类用途。这实现了数据的智能过滤,并显著提高了自动驾驶功能的安全性。
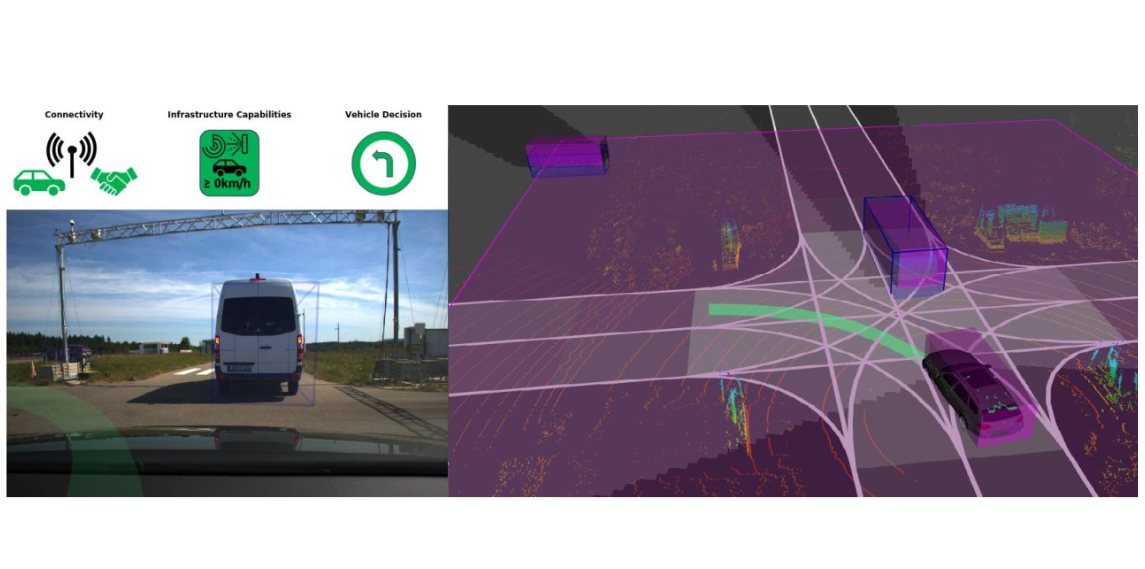
一个特别具有代表性的例子是城市路口的左转,博世、FOKUS和DCAITI参与了该项目,旨在提升该路口的安全性。为此,道路基础设施的环绕传感器(例如本例中的雷达或激光雷达系统)与车辆直接通信。ConnRAD方法使车辆能够根据数据的来源和质量评估其可靠性。具体而言,研究发现,如果车辆仅接收到没有元数据的路口通行许可信息,而驾驶员不进行干预,则会导致事故发生。但是,如果同时提供来自环绕传感器的元数据,车辆就可以评估其可靠性。例如,如果仅提供雷达信号(这可能不足以应对特别复杂的场景),车辆将中止转弯操作。只有当多个高质量环绕传感器(例如雷达和激光雷达)联合确认信息时,车辆才能安全转弯。在另一个例子中,htw saar使用合理性检查来评估V2X通信的可信度,从而防止在交通拥堵结束时发生追尾碰撞。
为实现高效的V2X通信,构建稳健的整体系统
ConnRAD开发了一种创新的通信架构,为构建稳健且具有弹性的整体系统奠定了基础。该架构不仅考虑了网络安全(抵御攻击)和功能安全(确保可靠运行),还兼顾了相关的监管和组织框架条件。
图片来源: 博世
该架构的核心是对现有消息协议和接口的扩展。这些扩展使得在运行过程中能够持续评估和验证通信信息。具体而言,数据的质量和可靠性变得可测量、可评估和可验证。当数据质量下降时,驾驶系统可以安全、自动地启动相应的应对措施,例如切换到其他信息源或调整驾驶行为。项目合作伙伴英飞凌科技股份公司在这方面做出了重要贡献:该公司设计了一种基于硬件的通信伙伴认证方案。在这种情况下,蜂窝组件的固有特征被有效地用作不可更改的“指纹”,从而能够唯一地识别传输的数据,证明其真实且源自该特定硬件。这极大地提高了安全性,因为数据的真实性和来源直接通过通信伙伴的硬件得到保证,任何篡改尝试都变得更加困难。
慕尼黑工业大学开发了一系列创新方法,旨在降低通信带宽,从而提高远程驾驶(通过安全连接远程控制车辆)的安全性。例如,他们采用了“能力感知协议(Ability Awareness Protocol)”结合信任指标,帮助系统清晰地在各个子系统间分配自身能力,动态识别边界并做出相应响应。此外,他们还提出了“网络预测服务质量”方法。该方法用于预测网络质量,以便在出现潜在通信问题时尽早进行干预。
乌尔姆大学基于概率的信任评估仿真结果也证实了系统韧性的显著提升。Fraunhofer IEM扩展了开发流程,将分布式驾驶功能的韧性要求系统地纳入系统开发中。TÜV SÜD对法律法规框架条件进行了评估。基于积累的经验和完成的仿真,ConnRAD合作伙伴得以构建参考架构,并开发出一套用于在互联分布式系统中构建韧性驾驶功能的完整方法。得益于ConnRAD方法,分布式系统中安全相关驾驶功能的可扩展审批如今已成为可能。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




