EPFL发明由可食用气动电池和执行器驱动的软体机器人

据外媒报道,瑞士洛桑联邦理工学院(EPFL)达里奥·弗洛雷亚诺智能系统实验室(Dario Floreano's Laboratory of Intelligent Systems)的研究人员利用柠檬酸和碳酸氢钠等常见厨房食材,研制出一种可食用的气动电池和阀门系统,为软体机器人提供动力。
图片来源: 期刊《Advanced Science》
软体可生物降解机器人被应用于环境监测、靶向药物输送等多个领域,其设计目标是在完成任务后完全消失。然而,这类机器人面临的主要问题是它们依赖于传统的电池(例如锂电池),而这些电池有毒且不可生物降解。迄今为止,还没有开发出仅使用可食用材料就能实现重复、自主运动的成功系统。
相关研究论文发表在期刊《Advanced Science》,详细介绍了研究人员如何开发出一种完全可食用的电源(电池)、一个阀门系统(控制器)和一个执行器(机器人的“肌肉”)。
系统工作原理
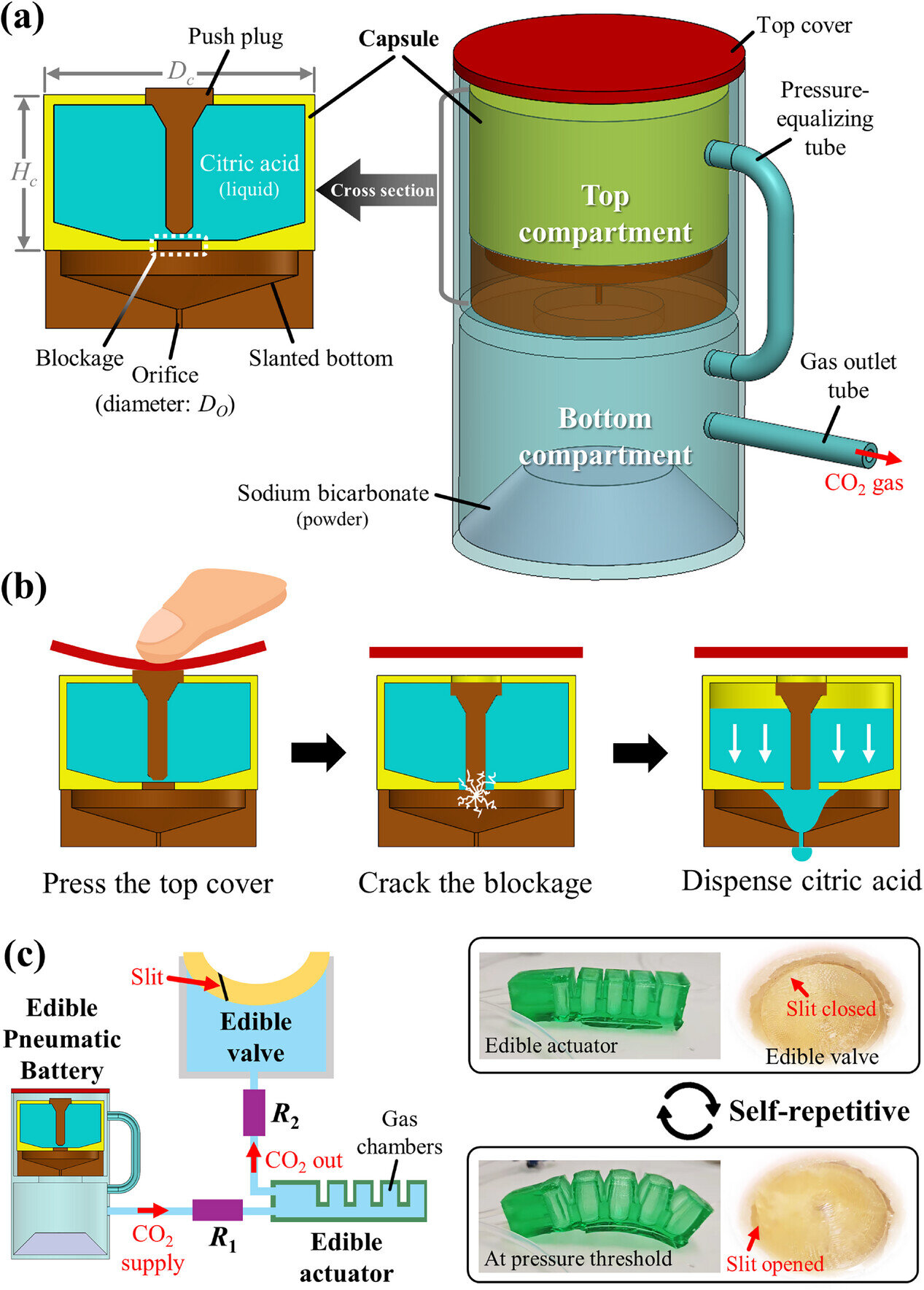
该电池由两个部分组成:一部分含有柠檬酸(柠檬中含有这种物质),另一部分含有碳酸氢钠粉末(俗称小苏打)。产生能量时,柠檬酸滴在小苏打上,使其安全地起泡并释放出加压的二氧化碳气体。这正是许多大学科学课上常见的经典“火山”化学反应。
研究人员在论文中写道:“本文所述的可食用气动电池利用碳酸氢钠和柠檬酸的化学反应,产生一种安全可食用、快速启动、成本低廉且对环境零影响的能源。”
二氧化碳气体流入由柔软的明胶制成的可食用致动器。随着内部气体压力的升高,致动器发生弯曲。这种弯曲就是机器人的运动。
当压力过高时,气体通过一个阀门释放。该阀门是一个带有狭缝的薄圆形明胶壳。随着压力下降,阀门自动关闭,电池提供的压力再次积聚,从而驱动下一个周期的有节奏运动。这种连续循环最终实现了机器人的自持运动。
该系统具有高度可编程性和可扩展性,能够针对特定任务进行精细调整。科学家通过调节酸液滴落开口的大小,可以控制气体的生成速率,进而影响机器人的移动速度。
同时,通过改变组件间的气体流动阻力,可以控制重复运动的次数。此外,电池可以制成各种尺寸,续航时间从最短20秒到最长650秒不等。
测试成功
研究人员在模拟真实环境的实验室中成功演示了他们的技术。他们制造了一种脚踩式执行器,可以埋在地下,当野猪等野生动物踩到时就会启动。
随后,机器人会反复移动(模拟活体猎物),吸引野生动物靠近。当野生动物吃掉机器人时,也会同时吞食其携带的营养物质或疫苗。不会留下任何有毒废物。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。