
熊本大学研究人员开发出新数学框架 可模拟复杂传感器系统

据外媒报道,日本熊本大学(Kumamoto University)的一个研究团队发布了一种新的数学框架,该框架能够精确地对使用多个以不同传感速率运行的传感器的系统进行建模。这项突破有望为更安全的自动驾驶汽车、更智能的机器人和更可靠的传感器网络铺平道路。该研究成果发表在期刊《Journal of Robotics and Mechatronics》上。
图片来源: 熊本大学
应对“多速率”挑战
从自动驾驶汽车到移动机器人,现代技术依赖于各种传感器,例如摄像头、激光雷达和惯性测量单元(IMU)。每个传感器都以各自的速率采集数据,从而形成一个“多速率”环境,其中信号到达的时间间隔各不相同。
迄今为止,在这种情况下构建精确的数学模型一直极其困难,因为传统的系统辨识方法假设所有数据都以相同的速率采集。
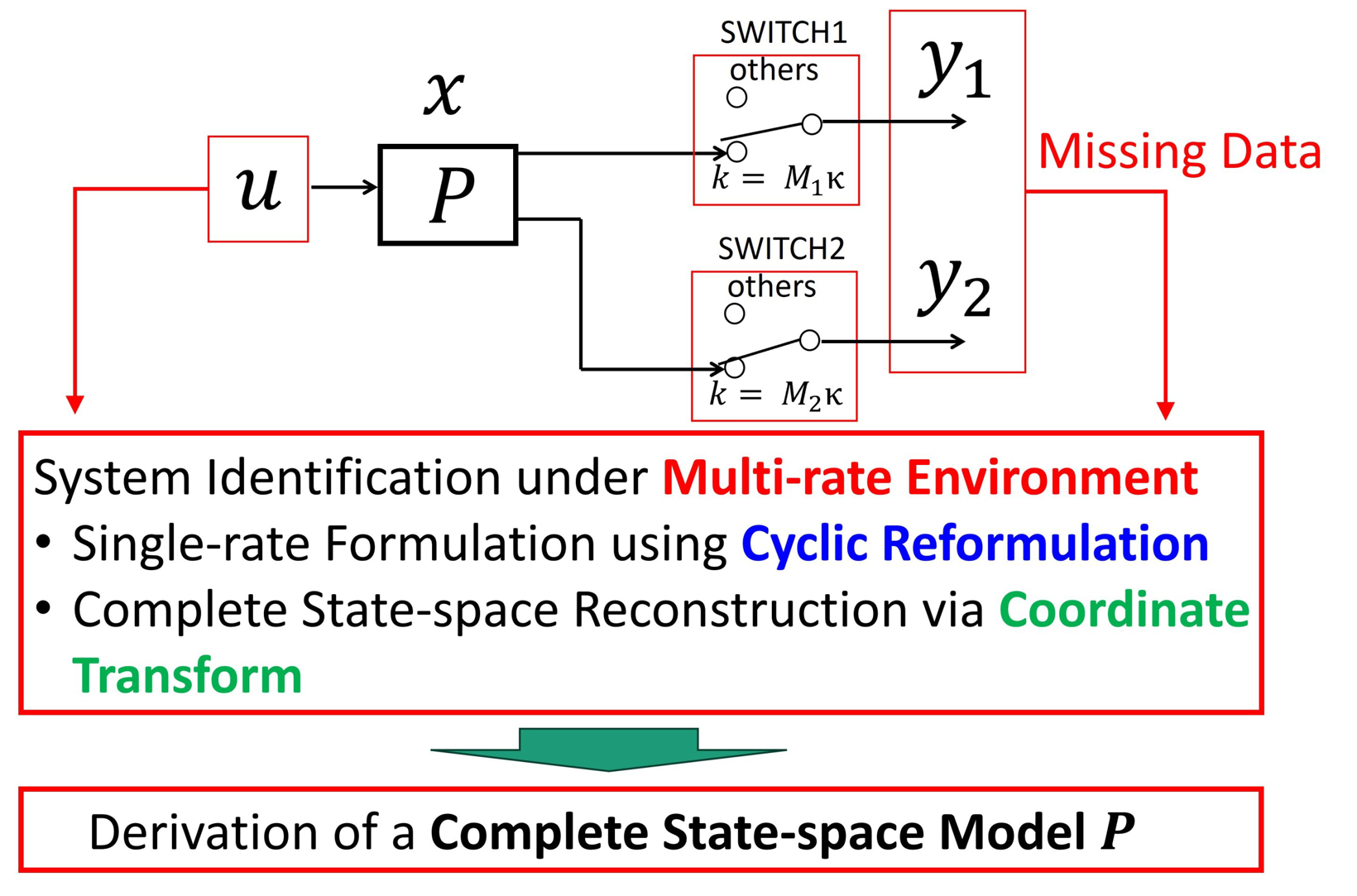
由副教授Hiroshi Okajima领导的熊本大学研究团队开发了一种克服这一障碍的新算法。他们的方法将多速率系统重构为类似于标准时不变系统的形式,从而可以使用现有的辨识技术。
通过引入一种特殊的“循环重构”和坐标变换,研究人员能够高精度地恢复原始系统的参数。
重要性
精确的系统辨识——即根据输入输出数据构建数学模型的过程——对于设计先进的控制系统至关重要。例如,在自动驾驶中,车辆必须整合来自多个传感器的信息,才能在瞬间做出决策。
如果底层模型不准确,安全性和性能都会受到影响。这种新方法无需特殊的周期性输入信号,并且能够处理实际的、真实世界的数据,因此非常适用于工业和科学系统。
成果展示
通过数值模拟,该团队证实,即使传感器以不同的采样率运行,他们的算法也能实现精确识别。与以往难以处理缺失或不匹配数据的方法不同,这项新技术能够忠实地重建系统结构。这为在异构传感器普遍存在的环境中实现稳健的基于模型的控制开辟了道路。
未来应用
这项研究的意义远不止于机器人领域。它可以增强物联网(IoT)网络中的传感器融合,改进工业工厂的监控,并为依赖多种测量设备的科学实验提供支持。熊本大学的研究团队通过提供坚实的理论基础,为多速率系统建模的实际应用奠定了基础。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





