日本研究人员发明仿生昆虫机器人 即使只有一根工作“天线”也能追踪气味

据外媒报道,日本联合研究小组开发出一种基于昆虫行为的仿生机器人系统,即使两个传感器中的一个发生故障,该系统也能在室内外稳定、精准地定位气味源。该团队成员包括日本国立情报学研究所(National Institute of Informatics,NII)助理教授Shigaki Shunsuke、东京理科大学工学部教授Kurabayashi Daisuke以及东北大学(Tohoku University)工学研究生院副教授Owaki Dai。
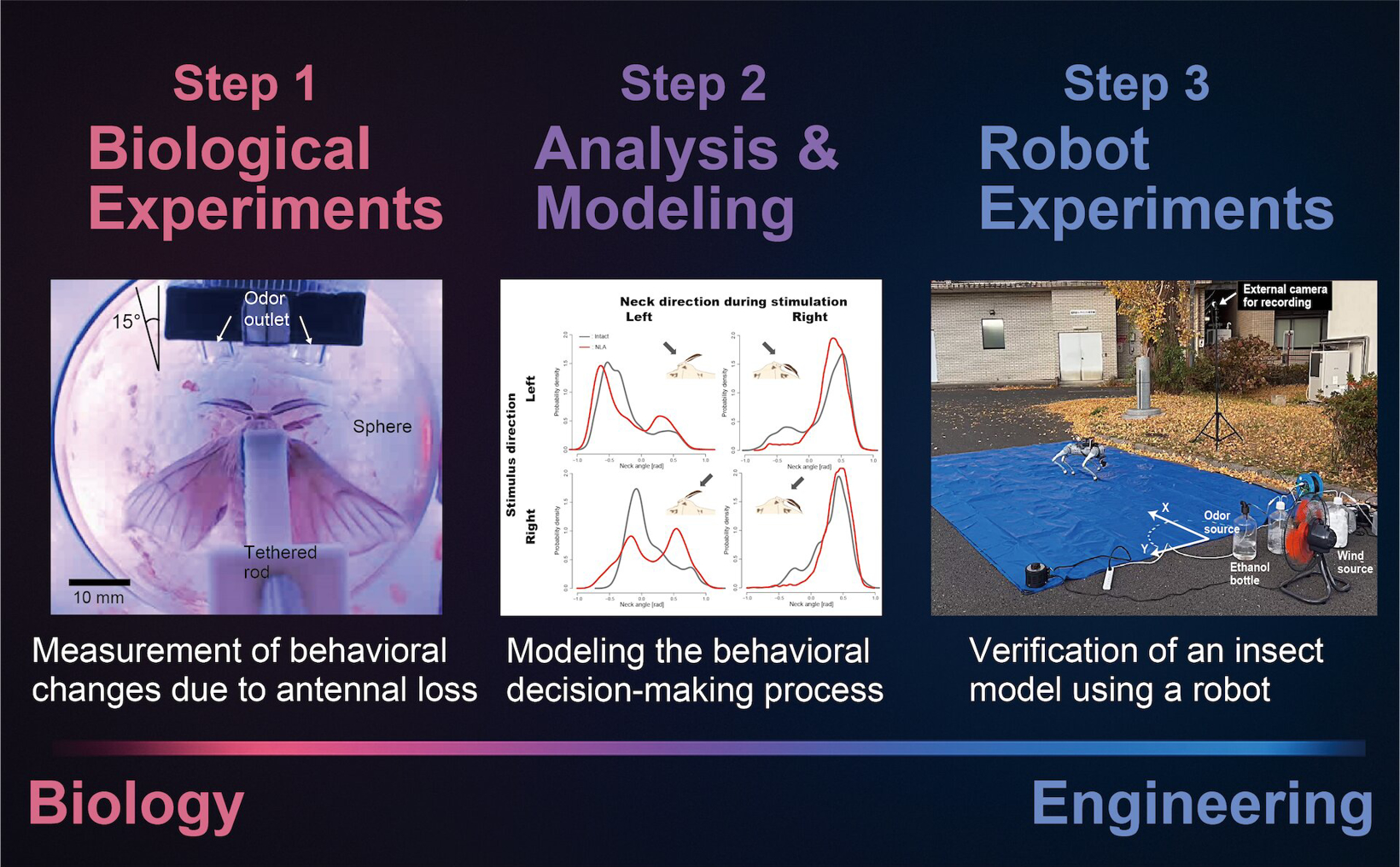
图片来源: NII
蚕蛾启发弹性设计
这项进展应用了蚕蛾(Bombyx mori)的生物学原理,蚕蛾即使失去一根触角也能仅靠一根触角维持有效的导航。研究人员将这些生物行为策略融入机器人设计,提出了一种开发弹性自主系统的新框架。该研究成果于2026年2月9日发表在期刊《npj Robotics》上。
利用气味(化学物质)作为线索定位目的地是众多生物共有的基本行为。尽管昆虫的大脑体积很小,神经系统也相对简单,但它们能够迅速探测到风力传播的气味分子,并据此找到食物来源或潜在的配偶。这种气味引导的导航行为长期以来一直是神经科学、遗传学和动物行为学等多个生物学领域的研究对象。
近年来,人们越来越关注将这些生物展现出的复杂行为原理应用于机器人系统。例如,能够探测和追踪气味源的机器人平台有望在灾害响应、危险物质和爆炸物探测以及环境监测等实际应用中发挥关键作用。
克服传统机器人的局限性
然而,大多数传统的嗅觉引导机器人系统都是基于左右两侧嗅觉传感器对称且功能完好无损的假设而设计的。在实际运行环境中,传感器故障或物理损坏可能导致一侧感觉输入的缺失,这会造成严重的性能下降,甚至导致气味源定位完全失败。迄今为止,尚未完全建立起在这种非对称感觉缺陷下仍能保持稳健性能的机器人系统。为了克服这一局限性,本研究借鉴生物体中观察到的适应性行为策略,提出了一种新的框架,实现了稳健的气味源定位。
在这篇论文中,研究人员以成年雄性家蚕(Bombyx mori)为模式生物,分析了它们在性信息素引导下对气味源的定位行为。在触角完整的情况下,家蚕利用位于头部两侧的一对触角获取空间分布的嗅觉信息,从而实现对气味源的精确定位。
值得注意的是,行为实验表明,即使失去一根触角,家蚕仍然能够仅凭剩余触角获取的嗅觉信息,通过适当选择和调节自身行为,高精度地找到气味源。这一发现揭示了家蚕能够动态整合单根触角上气味检测位置的信息及其当前飞行方向,并根据实际情况灵活调整其行为决策过程。
在真实机器人上测试该策略
为了验证所识别的行为决策机制的通用性和有效性,研究人员将这种受生物启发的感知运动策略应用于一个配备类似蚕蛾嗅觉传感器系统的机器人平台。利用该机器人系统,他们在受控的室内环境和复杂的室外环境中进行了气味源定位实验。
结果表明,即使在双侧传感器之一失效的情况下,机器人仍能保持与传感器失效前相当的定位性能,这不仅适用于室内环境,也适用于存在显著干扰的室外环境。这种受昆虫启发的自适应策略成功地保持了较高的定位成功率和高效的搜索性能。这些结果表明,在感觉功能受损的情况下,实现了稳健的气味引导导航,而使用现有机器人系统中实现的传统气味定位算法很难实现这一功能。
对未来自主系统的启示
本研究代表了仿生机器人领域的一项重大进展,它将源自生物行为的原理转化为工程系统。此外,它还为具备长期自主探索能力的机器人平台提供了关键的设计指导,尤其适用于灾害响应和其他具有挑战性的现实世界环境等应用场景。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。