
51Sim:构建下一代闭环仿真平台,端到端智能辅助驾驶系统测试中的创新与实践

当前辅助驾驶系统测试面临端到端闭环仿真的核心挑战:传统分立测试模式难以满足端到端系统尤其是一段式端到端系统的验证需求,仿真置信度不足与真实数据灵活性与交互性较差形成双重矛盾。51Sim通过融合3D/4D高斯技术与传统图形引擎,构建新一代仿真体系。
2025年7月22日,51Sim CEO鲍世强在2025第八届辅助驾驶大会上表示:“端到端与仿真闭环需求的结合使仿真难度倍增,而我们的3D高斯技术以低成本实现高置信度静态重建,4D高斯则赋予真实数据强泛化能力,这是突破仿真测试瓶颈的关键路径。”

鲍世强 | 51Sim CEO
以下为演讲内容整理:
51Sim的产品体系
51Sim目前主要致力于汽车领域的业务,同时也在积极拓展业务到智能装备、农业、港口、工业等泛行业的仿真领域。目前产品体系包括仿真平台和数据平台两部分:
SimOne智能辅助驾驶与机器人仿真平台采用云原生架构:支持云端大规模并发及端到端多传感器仿真。可实现一体化的仿真测试体系:整合场景创建、数据管理与HIL/SIL测试流程,同时还可以实现云 端远程多用户协作。产品基于OpenX场景仿真构建,场景引擎完整支持OpenX标准(如OpenDRIVE、OpenSCENARIO),具备所见即所得的场景编辑器,可以完全支撑规控及感知等多种不同类型的仿真需求。

图源:演讲嘉宾素材
仿真测试的核心矛盾与端到端测试的范式变革
进入端到端时代,高置信度传感器仿真与场景仿真成为了必答题,对仿真系统多个环节的置信度提出了更高的要求。

图源:演讲嘉宾素材
仿真总体上可以分为基于抽象建模的WorldSim与基于真实数据回放的LogSim两种做法。仿真的核心矛盾在于如何分别解决真实数据缺乏灵活性和仿真数据置信度面临挑战这两个关键问题。尤其进入到端到端阶段后,要求整个系统的全链路闭环仿真测试,这意味着传统的基于回灌的感知系统测试和场景驱动的闭环规控系统测试会逐渐失效,仿真的两个核心矛盾会更加突出。这要求一方面,在WorldSim仿真侧,仿真平台必须具备高精度动静态场景创建能力,和高质量传感器物理特性模拟能力,以最大化提升传统仿真因简化建模导致动静态场景,传感器模型、动力学模型误差累积形成置信度乘法效应,最终制约高阶辅助驾驶测试效率。另一方面,在LogSim数据仿真侧,仿真平台必须在原始真实数据上一定程度上构建出闭环仿真适配能力,通过AI重建和生成等多种手段,突破真实数据作为历史记录无法调整,无法适配和泛化的瓶颈。
3D高斯混合仿真引擎

图源:演讲嘉宾素材
针对仿真置信度的问题,51Sim正在将非常多的新技术进行产品化,3D高斯就是其中之一。3D高斯技术通过高斯球元描述场景几何与光照特性,实现低成本高保真静态场景重建,几何,材质细节还原度超过95%,在重建性能,适配性等多方面显著优于传统NeRF方案,同时非常好地解决了重建成本的问题;51Sim将3D高斯技术与传统图形引擎深度融合,构建新一代3DGS融合仿真引擎,在静态层采用3D高斯精准重建道路环境,动态层使用高真实感的3D模型或3DGS重建资产,同时完整保留OpenSCENARIO标准的结构化动态场景仿真体系。在场景视觉真实度、重建成本、泛化性之间找到了完美的平衡点。

图源:演讲嘉宾素材
51Sim已经构建了一套完整的3DGS重建流程,目前自动化重建的质量达到了仿真可用水平,如何让3DGS支持闭环仿真,最大的挑战是传感器模拟,需针对3DGS与3D模型混合场景解决包括毫米波雷达电磁特征响应和激光雷达特征适配问题。目前已经开发完成多摄像头、毫米波雷达及激光雷达的全流程闭环仿真系统,通过使用经过详细标定的高精度物理级仿真模型,可精确模拟摄像头畸变、激光雷达反射特性及毫米波雷达电磁波行为,这项技术已经在多个泊车场景和城市道路场景进行了算法闭环仿真验证。
4D高斯真实数据泛化
4D高斯技术聚焦真实数据灵活性提升,核心差异在于无需对整个世界进行过高层面的抽象,仅针对挖掘出来有价值的数据片段优化,使其变得更加灵活,增强对闭环仿真的适配性。
图源:演讲嘉宾素材
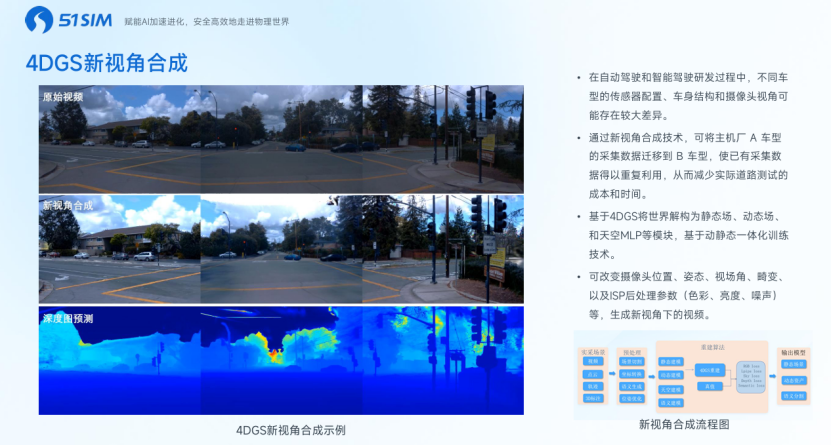
如何让采集的数据进行跨车型迁移,是其中一个有价值的应用方向。将主机厂A车型采集数据迁移至B车型传感器视角,实现跨车型摄像头位姿、视场角、畸变参数及ISP后处理参数的精准调整;在新视角合成模块中,基于动静态一体化训练技术生成符合物理规律的多视角视频,有效解决不同车型传感器配置差异导致的测试数据复用难题。

图源:演讲嘉宾素材
另一个应用方向是,让采集到的有价值的片段支持动态调整,例如将主车算法替换成另外版本的算法,更换车道,或者更换其他交通参与者的模型,对轨迹进行调整等。目前已经实现利用不同品牌、型号车辆及其他障碍物的资产,对原始资产进行替换,并确保替换资产与场景光照、阴影、反射等保持一致,以提升视觉真实感和仿真质量。同时利用扩散模型对轨迹实现泛化,并对新轨迹的细节进行补全,提高了合成图像的清晰度、真实感和感知一致性,确保轨迹泛化的合理性。
4D高斯闭环仿真体系非常复杂,目前51Sim已经初步完成构建闭环仿真流程,包括将传感器模型纳入仿真环节,后续将持续提升4DGS闭环仿真的可用性。
工程验证与落地实践
在置信度层面,51Sim感知仿真中摄像头畸变、鱼眼和雷达几何仿真精确度超过99.9%,图像质量精确度超过95%。同时在多传感器时钟同步和联合仿真中,多模态传感器一致性可达100%。经对比,仿真测试与场地测试的一致性超过92%,基于智能辅助驾驶算法的总体置信度超过90%,帮助客户实现高效且高置信度的端到端大模型的闭环仿真测试,完美满足各种严苛需求与挑战。
目前,51Sim的端到端测试方案已在多家主机厂实现成熟的落地应用,助力其突破软件在环(SIL)和硬件在环(HIL)测试中的仿真效率与置信度瓶颈,实现更精准、更可靠且可扩展的结果,赋能端到端系统安全性的提升。
未来挑战与演进方向
仿真数据的置信度与真实数据的泛化性是端到端时代仿真测试面对重要挑战,51Sim将持续融合新一代的AI及仿真技术,推动端到端智能辅助驾驶系统测试领域创新,构建端到端闭环验证体系,助力车企突破端到端测试的置信度与效率瓶颈,加速高阶智驾安全落地
(以上内容来自于51Sim CEO鲍世强于2025年7月22日在2025第八届智能辅助驾驶大会上进行的发表的《构建下一代闭环仿真平台:51Sim在端到端智能辅助驾驶系统测试中的创新与实践》主题演讲。)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




