直击车载传感器清洁痛点,考泰斯Allegro筑牢ADAS安全防线

随着车辆智能化程度持续提升,车载摄像头及激光雷达的搭载数量呈持续增长态势,广泛分布于车辆周身及车顶区域。
然而在复杂多变的天气下,尤其在沙尘高发区域,车载摄像头表面易附着粉尘、水滴等污染物。当摄像头表面脏污覆盖率超过15%时,其感知功能易出现性能降级,甚至完全失效,直接对车辆行驶安全构成严重隐患。
针对这些风险,当前车载感知设备自清洁系统的核心技术路线,是通过高压气体与清洁水的协同作用,实现对摄像头及激光雷达表面污染物的高效清除。
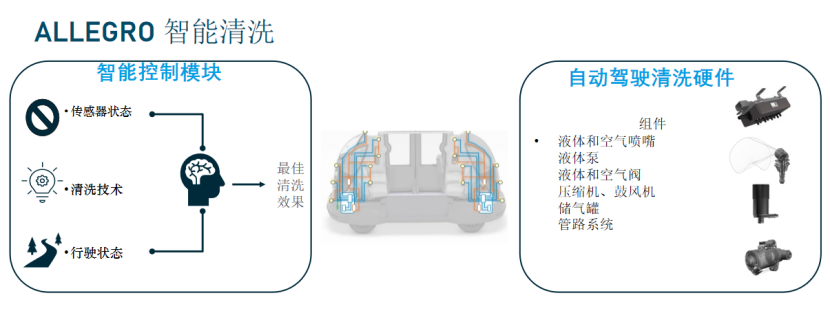
KAUTEX Allegro产品线为此提供了全链路系统解决方案,涵盖多项关键核心部件:在气体清洁环节,系统搭载鼓风机与高压气泵,为污染物清除提供稳定高压气源;在水清洁环节,通过整合高压水泵、清洗介质存储水壶、介质余量实时探测液位传感器、介质输送管路及精准喷射喷嘴,构建清洁水“存储-探测-输送-喷射”的完整链路;此外,为保障各部件间的高效协同运行,系统还配置了分配阀与专用控制器,最终构建起闭环式清洁控制体系。
车载摄像头清洁系统的挑战
在盖世汽车2025第五届智能商用车创新大会上,考泰斯中国区技术研发负责人何丽中对辅助驾驶系统清洁系统Allegro的动态测试进行了详尽阐释。他提到,为验证清洗系统的有效性,考泰斯研发团队首先开展了静态条件下的清洗功能验证,确认基本参数达标。但车辆的安全性能最终需在实际行驶场景中体现,因此,动态条件下清洗系统对传感器性能的影响也极为重要。

何丽中 | 考泰斯中国区技术研发负责人
车辆行驶过程中常面临强逆风环境,如何能确保清洁系统在不同行驶场景下,均能达到理想清洁效果?为此,考泰斯做了大量实验。
以激光雷达的静态清洁测试为例:当车顶与侧面激光雷达表面被脏污完全覆盖(覆盖率100%)时,设定0.7秒为一个清洗周期,耗水量约16.3毫升,可将脏污覆盖率降至3.4%,满足激光雷达行驶中的正常使用需求。
针对侧面激光雷达,经约0.9秒清洗周期(耗水量19毫升),脏污覆盖率可降至4.3%。这一系列静态测试结果表明,系统在静止状态下清洁效果显著,可实现“脏污覆盖率小于5%、清洗时间小于1秒”的目标。
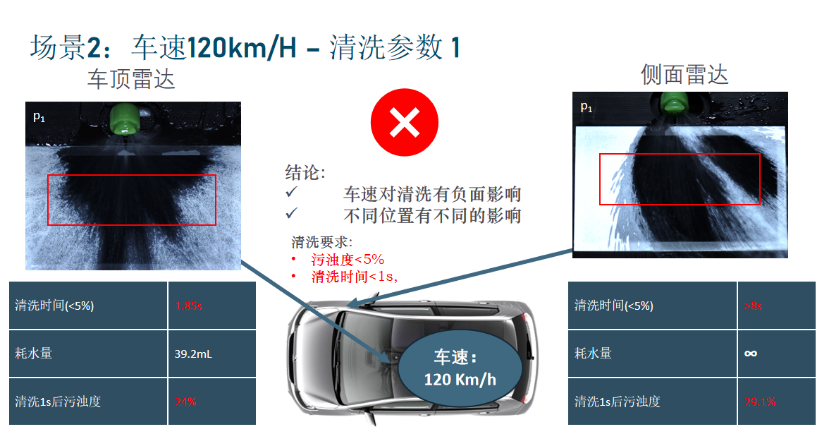
然而,当测试场景切换至高速行驶状态(车速120公里/小时),采用与静态测试相同的激光雷达及清洗参数时,问题逐渐显现:清洗系统运行1.5-1.8秒后,车顶激光雷达表面脏污覆盖率仍高达24%,残留污染物较多;侧面激光雷达经8秒清洗后,脏污覆盖率仍达29%,且车辆左右两侧激光雷达的污染物残留差异明显。
对比静态与动态测试数据可见,车速对清洗效果存在显著的负面影响,甚至可能导致清洗系统无法达到预期目标;同时,车顶与侧面雷达因安装位置不同,清洗结果存在差异——这表明不同位置的传感器受逆风环境的影响程度各不相同。显然,高速行驶下的清洁效果已无法满足整车厂的技术要求与用户的安全需求。
动态匹配压力参数,破解高速场景清洁难题
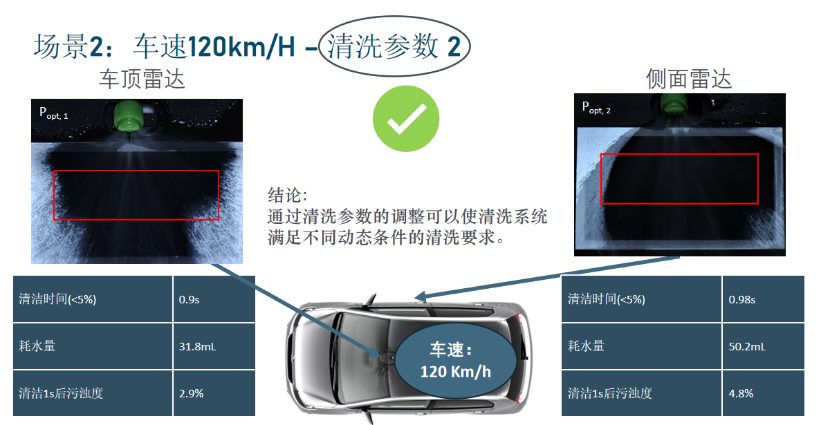
对于这一短板,考泰斯研发团队提出优化方案:根据不同车速,动态匹配相应的清洗压力参数。优化后的数据显示,动态测试中,车顶激光雷达可在0.9秒清洗周期内将脏污覆盖率降至2.9%,侧面激光雷达也能在0.98秒内降至4.8%。尽管参数调整后耗水量略有增加,但总体结果表明,通过动态适配清洗参数,自清洁系统能够满足车辆在不同动态行驶条件下的传感器清洁基本要求。
在实验室环境中,以相同初始脏污覆盖率和清洗参数开展大量连续测试。可见,未调整参数时,在0公里/小时(静态)下,仅需约1秒即可使脏污覆盖率降至目标值(小于5%);而在120公里/小时(动态)的行驶状态下,需等待约2.4秒才能确保脏污覆盖率低于5%。参数调整后,即使在相同的行驶状态,只需0.98秒,脏污覆盖率已开始低于目标性能点。
基于上述大量测试,得出三项核心结论:一是车速对清洗效果存在显著负面影响,车速越高,达到目标清洁度所需时间越长;二是传感器安装位置不同,清洗效果也存在差异,需针对性优化;三是通过动态调整清洗参数,可使系统满足不同行驶场景下的清洁需求。
双重测试验证:模拟仿真 “风洞实验室”
在产品设计环节,尽管当前行业普遍依赖模拟仿真技术模拟不同工况,但考泰斯不仅依托模拟仿真,更自建风洞实验室以模拟各类动态行驶条件,确保向客户提供的设计方案能实现“一次评估通过”,同时,清洗参数的自适应配置也已成为高级别多点传感器清洗场景中的核心需求。
在系统开发层面,考泰斯负责全链条研发,既涵盖此前提及的高压水泵、鼓风机、分配阀等机械部件的内部开发,也包括控制软件的自主研发——具体涉及清洁请求优先级排序、多场景清洗参数优化、系统内各执行部件的并行协同控制,以及全流程自诊断功能开发。在开发过程中,我们会运用多种专业软件辅助设计,例如上图中用于优化清洁效果的喷嘴射流模拟软件。
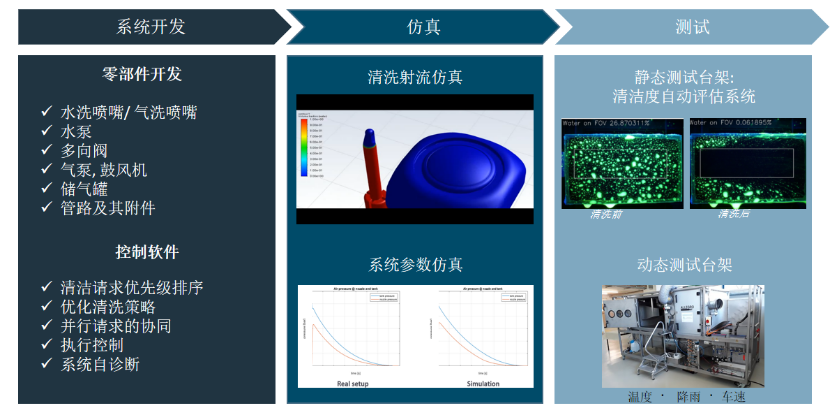
需特别说明的是,相较于传统风窗清洗系统(因产品成熟度高且有雨刮辅助,对喷嘴目标准确性要求较低),摄像头与激光雷达的高压清洗对喷嘴目标准确性要求极高,因此对仿真技术的需求也更为严苛。
基于此,在测试环节,考泰斯专门投资建设了内部风洞测试平台,可精准模拟温度、湿度、溅雨、不同车速等复杂行驶条件,确保各项参数具备高可靠性,帮助客户避免在整车上重复开展动态测试,大幅提升研发效率。
Allegro智能清洗系统的核心优势,在于智能控制模块的自适应能力:该模块可实时接收传感器反馈的状态信息,包括清洁/污浊状态,若传感器支持,还能获取污染物种类信息,以此为依据优化清洗策略;同时,系统会结合当前行驶条件(如车速、环境湿度等),通过控制器精准操作各执行部件,最终实现“多场景覆盖、低能耗、轻量化”的清洁效果。
另外,清洗槽由100%可回收材料制成,耐用性是标准挡风玻璃清洗泵的6倍,较长的使用寿命进一步减少了浪费。其清洁过程较为智能,清洁点优先顺序由软件控制,因而整体系统重量有所减轻,能耗也得以降低。
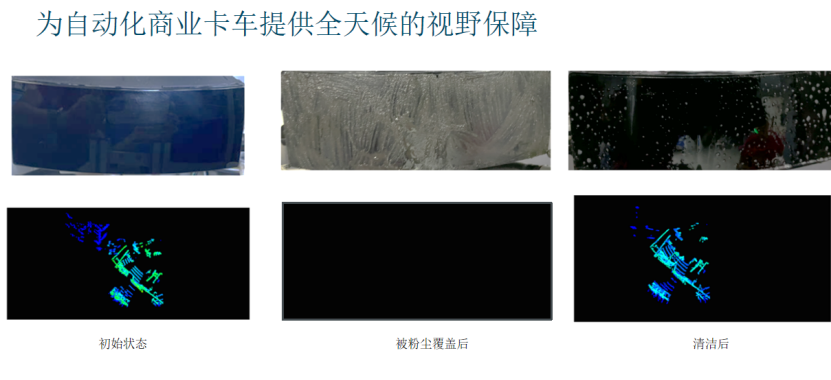
今年,考泰斯为某商业卡车提供的激光雷达前期研发项目,便是该系统的典型应用案例:左侧为激光雷达未受污染的正常状态,中间是被粉尘完全覆盖后云点消失的失效状态,右侧则是经系统清洁后云点恢复正常的状态,直观体现了系统的清洁效能。
关于考泰斯
考泰斯是一家传统的汽车零部件百年企业,也是行业百强企业之一,主要产品线包括传统汽车使用的燃油箱系统、视野清洗系统、新能源汽车的电池包和汽车自动和辅助驾驶用到的摄像头和激雷达清洗系统。
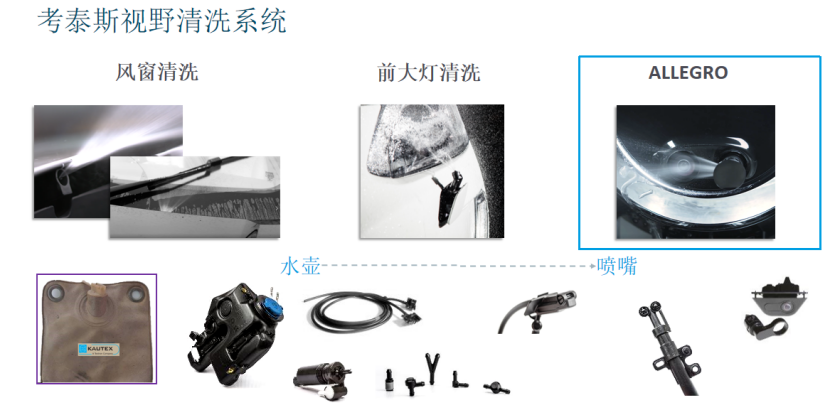
自1996年开展视野清洗业务以来,考泰斯持续提供切实可行且性价比高的解决方案。主要业务包括风窗清洗、前大灯清洗、摄像头和激光雷达清洗,技术路线主要是通过高压的气或水去除表面的脏污。通过产品设计和生产能力的不断整合,提供从流体存储、执行、传输、清洁操作的全系统。
何丽中谈到,当前智能驾驶领域中,汽车“大脑”已足够强大,智能辅助驾驶的决策能力日趋成熟。但我们始终认为,智能驾驶汽车不仅需要“聪明的大脑”,更需要“清晰的视野”——考泰斯作为专注于摄像头、激光雷达智能自清洁系统的专家级企业,致力于为商用车智能驾驶“擦亮眼睛”,筑牢安全行驶的视觉防线。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。