芬兰图尔库大学开发可拉伸的电子皮肤 使机器人手能够感知触摸和压力信号

那些能够弯曲、卷绕甚至模仿人类皮肤的可伸缩透明电子器件正逐渐走向实际应用。据外媒报道,芬兰图尔库大学(University of Turku)的研究团队开发出受树叶等自然结构启发的新型柔性电子材料制造方法。这项研究有望重塑未来设备的制造方式,从智能手机到医疗假肢都将受益。
该团队由材料工程系助理教授Vipul Sharma领导,致力于研发兼具柔性和可持续性的电子材料。研究人员没有依赖传统的刚性材料,而是研究了自然界如何构建轻盈而坚固的结构,并在工程材料中复制了类似的模式。
图片来源:图尔库大学
Vipul Sharma表示:“我们的目标是只使用环保材料实现高效率。我们开发的柔性电子材料具有可拉伸、透气、导电和透明的特性。正因如此,它们优于其他同类材料。”
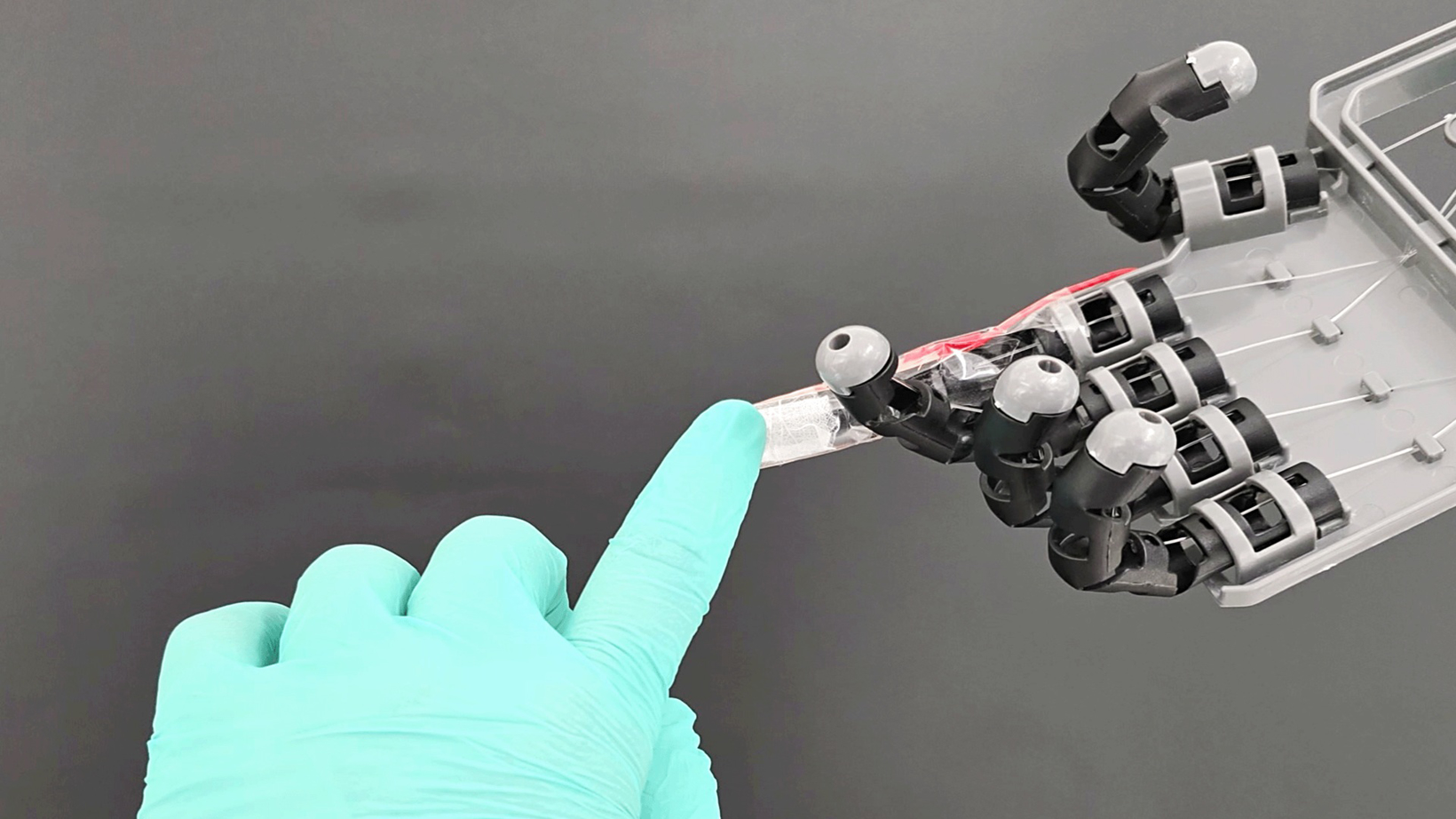
为了测试这种材料,研究人员开发出一种电子皮肤,并将其安装到机器人手上。该系统运行正常,集成的压力传感器能够响应触摸,并为机器人提供触觉反馈。
触摸机器人皮肤
研究人员表示,这是迈向先进假肢和人机交互界面的早期阶段。未来,类似的电子皮肤可以让假肢使用者感知压力、温度和湿度,使人造肢体更接近自然的感官功能。
柔性电子技术也被集成到软体机器人领域。这一新兴领域旨在创造能够与人类安全互动并适应复杂环境的机器。这些系统目前正被探索用于医疗保健、工业和救援任务。
软体机器人可以胜任医院中一些体力消耗巨大的任务,例如搬运病人;在工业环境中,它可以用来搬运易碎物品而不会造成损坏。其柔性结构也使其能够在狭小空间内作业,因此适用于地下救援任务,甚至可能应用于太空领域。
能够安全适应环境的机器人
图尔库大学自动化工程系助理教授Anastasia Koivikko表示:“我和我的研究团队共同研发了一种软体设备,可以用于医疗保健领域,例如帮助患者进行肢体康复。对于辅助患者的机器人来说,柔软的材质至关重要,这样才能确保患者感到舒适并安全使用。”
研究人员也在努力用更环保的替代品取代传统的硅基组件。他们的目标是在保持性能的同时,减少机器人系统对环境的影响。如今,软体机器人可以由压缩空气、电力、光或液体驱动,从而实现诸如伸展、弯曲或从狭小空间跳跃等动作。
Koivikkob表示:“软体机器人适用于多种任务,但尚未得到广泛商业化应用。例如,智能机器人可以检测水果和浆果的成熟度并进行采摘。软体机器人还可以在高辐射的核电站等对人类有害的环境中工作。”
该研究团队还致力于利用芬兰木材资源衍生的生物质开发可持续电子产品。其目标是用本地可再生资源替代高耗能材料,同时减少对进口零部件的依赖。
Sharma表示:“森林是芬兰的‘石油’。欧洲其他国家没有像芬兰一样拥有如此丰富的木材资源。目前,电子产品中使用的许多材料都来自中国。芬兰生物质在国际市场上具有巨大的潜力。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。